

Introduction
Materials and Methods
Overview of the cabbage harvester
Three-dimensional modeling and simulation framework
Modeling of soft-ground soil parameters
Determination of the center of gravity
Simulation and experimental assessment of rollover stability
Dynamic turning simulation under lateral slope conditions
Field evaluation of in-operation dynamic stability
Analytical procedures
Results and Discussion
Center of gravity characteristics and stability implications
Overturning characteristics under different load conditions
Dynamic turning simulation results under lateral slope conditions
Dynamic inclination response during field operation
Conclusion
Introduction
Cabbage (Brassica rapa subsp. pekinensis) is a major vegetable crop worldwide and holds particular importance in Republic of Korean cuisine traditions (Ali et al., 2025). Food and Agriculture Organization of the United Nations (FAO) crop statistics and long-term trends indicate that cabbages and allied brassicas are consistently cultivated across many countries, supplying both fresh markets and processed food supply chains (FAO, 2023). To address labor shortages, shorten harvest time, and improve operational efficiency, mechanization of cabbage harvesting has become a strategic priority, particularly in regions dominated by small and medium sized farms (Ali et al., 2024). However, cabbage harvesting poses distinctive engineering challenges due to low cutting height requirements, variability in head size and maturity, and uneven field surfaces, all of which can increase machine instability and impose severe ride dynamics on operators.
As compact self-propelled harvesters become more prevalent in vegetable production systems, operator safety and occupational health require more systematic evaluation. Rollovers are widely recognized as one of the most severe hazards in agricultural machinery operation, and interventions such as rollover protective structures have been shown to reduce fatality risk in tractor rollover incidents (Reynolds and Groves, 2000). However, compared with tractors and larger machines, safety evaluations for compact self-propelled vegetable harvesters remain limited (Du et al., 2019). This gap is especially relevant for compact cabbage harvesters operated on small and medium sized farms where irregular terrain and constrained field geometry may amplify both rollover risk and vibration exposure.
Rollover risk is influenced by both static and dynamic stability characteristics of agricultural machines. Dynamic stability reflects temporary effects that occur during operation, such as changes in speed, steering actions, uneven ground, and interactions between the running gear and soil, all of which can shift loads and reduce stability compared with static conditions (Carabin et al., 2025). However, the static rollover angle remains a widely accepted and standardized indicator for safety assessment, particularly for comparing different machine configurations and identifying differences in stability margins. Because the location of the center of gravity (CoG) strongly affects both static and dynamic stability, accurate determination of the CoG is an essential prerequisite for reliable safety evaluation and stability modeling (Radzajewski and Guzek, 2021).
Overturning can occur as lateral or longitudinal rollover depending on the direction of the destabilizing moment relative to the machine support base. Lateral rollover is often critical during cross slope travel and turning on uneven ground, whereas longitudinal rollover may occur on steep gradients, during abrupt traction changes, or under pronounced rear or front-loading conditions (Hwang et al., 2021). Recent literature emphasizes the need to evaluate stability beyond pure lateral scenarios by considering a broader range of machine orientations and operational configurations (Jang et al., 2024). In this context, multi orientation stability maps generated using tilting rotating test rigs and validated numerical models have been proposed to represent rollover limits across orientations, enabling more comprehensive characterization than single direction testing (Karaca et al., 2026).
Computational rollover assessment is increasingly performed using multibody dynamics (MBD) modelling, in which the vehicle system is represented with sufficient fidelity and the predicted behavior is verified through controlled experiments. Prior studies have demonstrated the applicability of this approach across diverse platforms and test modes. reproduce laboratory rollover test conditions, Czechowicz and Mavros (2014) established a high-fidelity multibody model calibrated against measurement data, and Viganico et al. (2025) investigated tractor–semi-trailer stability using multibody systems incorporating flexible chassis representations and tire models validated through handling and stability tests. In agricultural engineering, simulation-based stability-angle analysis has also been applied to quantify rollover limits of compact self-propelled harvesters under varying load states and design modifications (Kim et al., 2022).
Despite growing mechanization in vegetable production, comprehensive stability assessments for compact single-row self-propelled harvesters remain limited. Existing stability criteria and safety margins are largely derived from tractor-based platforms or larger multi-row machines and may not transfer directly to compact harvesters because of substantial differences in mass distribution, undercarriage configuration, and working-unit layout. findings for compact cabbage harvesters further indicate that overturning behavior is highly sensitive to payload and operating direction, suggesting that safety margins may be narrower than expected when tractor-derived assumptions are applied without adaptation (Ali et al., 2021). These limitations highlight the need for stability evaluation approaches specifically adapted to one-row self-propelled harvesters and validated under realistic terrain and loading conditions.
Therefore, the objective of this study was to quantify the rollover stability and in-field dynamic stability of a 36.8 kW single-row self-propelled cabbage harvester using simulation and experimental field evaluation approaches.
Materials and Methods
Overview of the cabbage harvester
The machine evaluated in this study was a one-row self-propelled cabbage harvester developed for open-field harvesting. The overall configuration is illustrated in Fig. 1, and the principal technical specifications are summarized in Table 1. The harvester was powered by a 36.8 kW diesel engine operating at a rated speed of 2,400 rpm. Engine output is delivered via a multi-stage gearbox to the cutting unit, conveying system, and crawler-type driving unit. The primary structure consisted of a reinforced steel chassis designed to withstand static and dynamic loads encountered during operation on uneven agricultural terrain. A crawler undercarriage was adopted to increase a large ground-contact area and traction, which was advantageous on soft soil and sloped fields relative to wheel-drive vehicles (Wong, 2010).
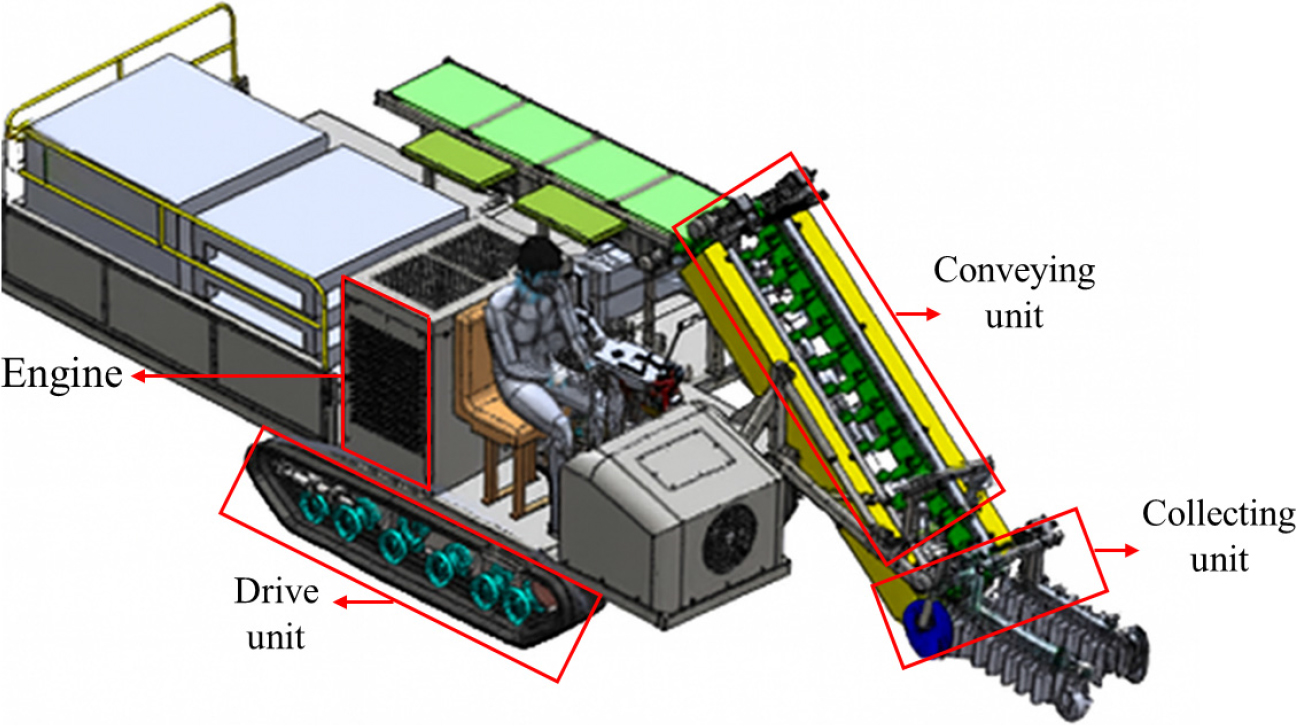
Table 1.
Specifications of the self-propelled one-row cabbage harvester.
The harvesting module was mounted at the front of the machine and includes lifting and detachment components that separate cabbage heads from the soil surface. Detached cabbage heads were guided to the conveying system, which consists of chain-and-slat and belt mechanisms, and were subsequently transferred to a rear storage unit for temporary accumulation. Similar structural layouts are widely used in mechanized vegetable harvesters to improve harvesting efficiency and reduce manual labor requirements (Liu et al., 2025).
Three-dimensional modeling and simulation framework
A three-dimensional (3D) model of the self-propelled cabbage harvester was developed in a commercial computer-aided design (CAD) environment (Dassault Systèmes, 2020) and exported as a STEP file. The model was imported into MBD software (FunctionBay, 2025) to evaluate driving stability and rollover behavior under static and quasi-static conditions. MBD simulation is widely applied for analyzing the stability of agricultural and off-road vehicles operating on deformable terrain (Karaca et al., 2026). In the simulation model, the major structural components of the harvester were treated as a single rigid body, and the calculated machine mass was applied together with additional payloads representing harvested cabbage.
The simulation environment was configured to represent crawler harvester operation on both rigid and deformable ground surfaces, reflecting cabbage-field and off-road conditions encountered during harvesting and transport. Lateral rollover was evaluated by increasing the ground inclination angle until instability occurred, consistent with static rollover test procedures for tracked agricultural vehicles (Huang et al., 2012; Franceschetti et al., 2014). All simulations were performed under static driving conditions, neglecting inertial excitation and transient dynamic effects, to identify the critical overturning angles associated with machine geometry and load distribution. This quasi-static approach is widely used for preliminary slope-stability evaluation of agricultural machinery (Zhou et al., 2014).
Modeling of soft-ground soil parameters
Soil mechanical properties substantially influence the stability of tracked agricultural vehicles on deformable terrain. Beyond the harvester self-weight, crawler–soil interaction affects ground pressure distribution, shear resistance, and load transfer, which in turn alter rollover propensity. To represent realistic field operating conditions, the RecurDyn deformable terrain module was used. The terrain was defined as clay–loam soil, which is commonly observed in cabbage production fields in the Republic of Korea. Studies reported cabbage fields textures vary by region, ranging from sandy soils to clay–loam soils (Chang et al., 2014; Kim et al., 2015).
The pressure–sinkage behavior of the deformable ground was modeled using the classical relationship proposed by Bekker (1956):
where, is the vertical ground pressure, is the cohesive soil deformation modulus, represents the frictional soil deformation modulus, is the effective width of the ground-contacting crawler track, is the sinkage depth, and is the soil deformation exponent characterizing soil compressibility.
In addition, the shear stress–displacement relationship at the soil–track interface was described using the empirical model proposed by Janosi and Hanamoto (1961):
where, 𝜏 is the shear stress, is the shear displacement, is the soil cohesion parameter, 𝜙 is the internal friction angle of the soil, and is the shear deformation coefficient governing the rate of stress development.
The empirical parameters required for these models were implemented consistently in the simulation environment. For the clay–loam soil considered in this study, the values kc = 0.27 N·mm1+n, kϕ = 1.6 × 10-2 N·mm2+n, n = 0.73, c = 6.1 × 10-3 N·mm2, and ϕ = 26.6° were adopted to reproduce realistic crawler–soil interaction behavior (Ali et al., 2021).
To further clarify the boundary between sliding and overturning, the soil parameters used in the RecurDyn deformable terrain model were clearly defined as frictional resistance and ground stiffness have a direct influence on crawler–soil interaction behavior. The selected clay–loam soil parameters were intended to represent typical Korean upland field conditions for cabbage production and were applied consistently across all simulation cases. The pressure–sinkage parameters (kc, kϕ, n) were used to characterize the vertical bearing stiffness and sinkage response of the soil, whereas the shear strength parameters (c, ϕ) were used to describe the resistance of the soil against crawler sliding. Accordingly, the simulation model incorporated both normal soil deformation and shear resistance, enabling a more reliable evaluation of the dominant instability mechanism. Specifically, the model could distinguish whether machine instability was primarily associated with crawler sliding along the soil surface or with a reduction in the uphill crawler reaction force, which may ultimately lead to overturning. These soil parameters were selected based on reported clay–loam soil properties and previous terramechanics-based crawler–soil interaction studies.
Determination of the center of gravity
The CoG of the self-propelled cabbage harvester represents the resultant balance point of the machine mass and is a critical parameter governing overall stability and rollover behavior. As shown in Fig. 2, the CoG coordinates are defined along the longitudinal, lateral, and vertical axes to provide a consistent reference for subsequent analyses. Accurate CoG estimation is particularly important for lateral rollover simulations, as even small shifts in CoG location can lead to meaningful changes in predicted stability angles and overturning thresholds (Jazar, 2025). Therefore, precise identification of the CoG coordinates is essential for reliable stability evaluation of the harvester under different loading and operating conditions.
The CoG coordinates in the longitudinal (Xc), lateral (Yc) and vertical (Zc) directions were determined in accordance with ISO 789-6 (ISO, 1982), using a combination of ground reaction force measurements and inclination-based methods. During CoG identification, all movable components were mechanically constrained to eliminate relative motion, and frictional interactions between structural elements were neglected in order to isolate the geometric mass distribution of the machine.
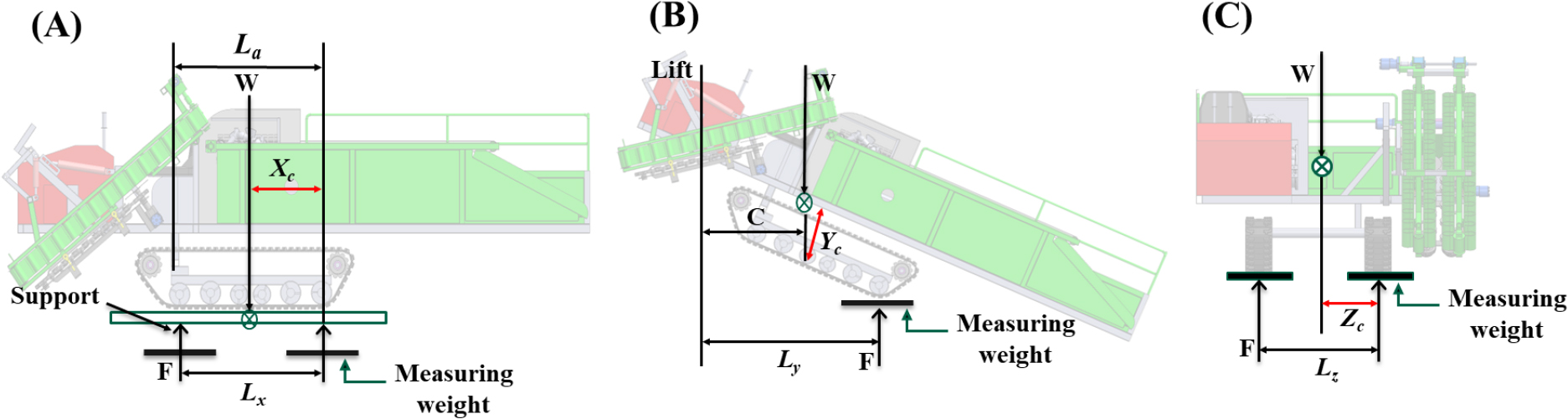
The longitudinal CoG coordinate was obtained from force equilibrium in the longitudinal direction using Eq. (3) as follows:
where, is the ground reaction force induced by the harvester weight, is the total vertical weight of the harvester, and is the longitudinal distance between the rear-drive and front-drive wheels.
This approach allows accurate estimation of the longitudinal mass distribution under static equilibrium conditions. The lateral CoG coordinate was determined using an inclination method as follows:
where, is the horizontal distance from the lifting hook to the rear wheel, is the measured ground reaction force at the rear wheel, is the total machine weight, is the vertical distance between the driving wheel origin and the lifting point, and 𝜃 is the lifting inclination angle. This method effectively captures lateral mass asymmetry, which is a key contributor to sideways rollover.
The vertical CoG coordinate was calculated from ground reaction force distribution between the crawler tracks as follows:
where, is the track-to-track width, is the ground reaction force acting on the right track, and is the total vertical weight of the harvester.
This formulation reflects the vertical mass distribution and is particularly relevant for evaluating rollover stability on sloped terrain. The resulting CoG coordinates (Xc, Yc, and Zc) obtained from these measurements were used as input parameters for the subsequent numerical stability simulations.
Simulation and experimental assessment of rollover stability
The rollover stability of the self-propelled cabbage harvester was evaluated using numerical simulation to quantify resistance to sideways overturning under representative operating conditions. Two load states were considered: an unloaded condition representing the self-weight of the machine, and a loaded condition incorporating an additional 500 kg payload to simulate the mass of harvested cabbages and associated operational components. This load magnitude was selected based on typical field accumulation during harvesting operations and reflects realistic variations in machine mass distribution.
In the simulation framework, the tracked harvester model was rotated through a full 360° range of ground orientation to systematically examine the combined influence of slope angle and vehicle heading on lateral stability. This approach enabled assessment of stability margins across different travel directions relative to the slope, recognizing that overturning susceptibility can vary substantially with machine orientation due to asymmetric mass distribution and track geometry. The onset of overturning was identified by monitoring changes in vehicle posture, including loss of ground contact and rapid angular displacement indicating instability. The numerical simulation procedure and the corresponding experimental validation setup under unloaded conditions are illustrated in Fig. 3(A) and (B).
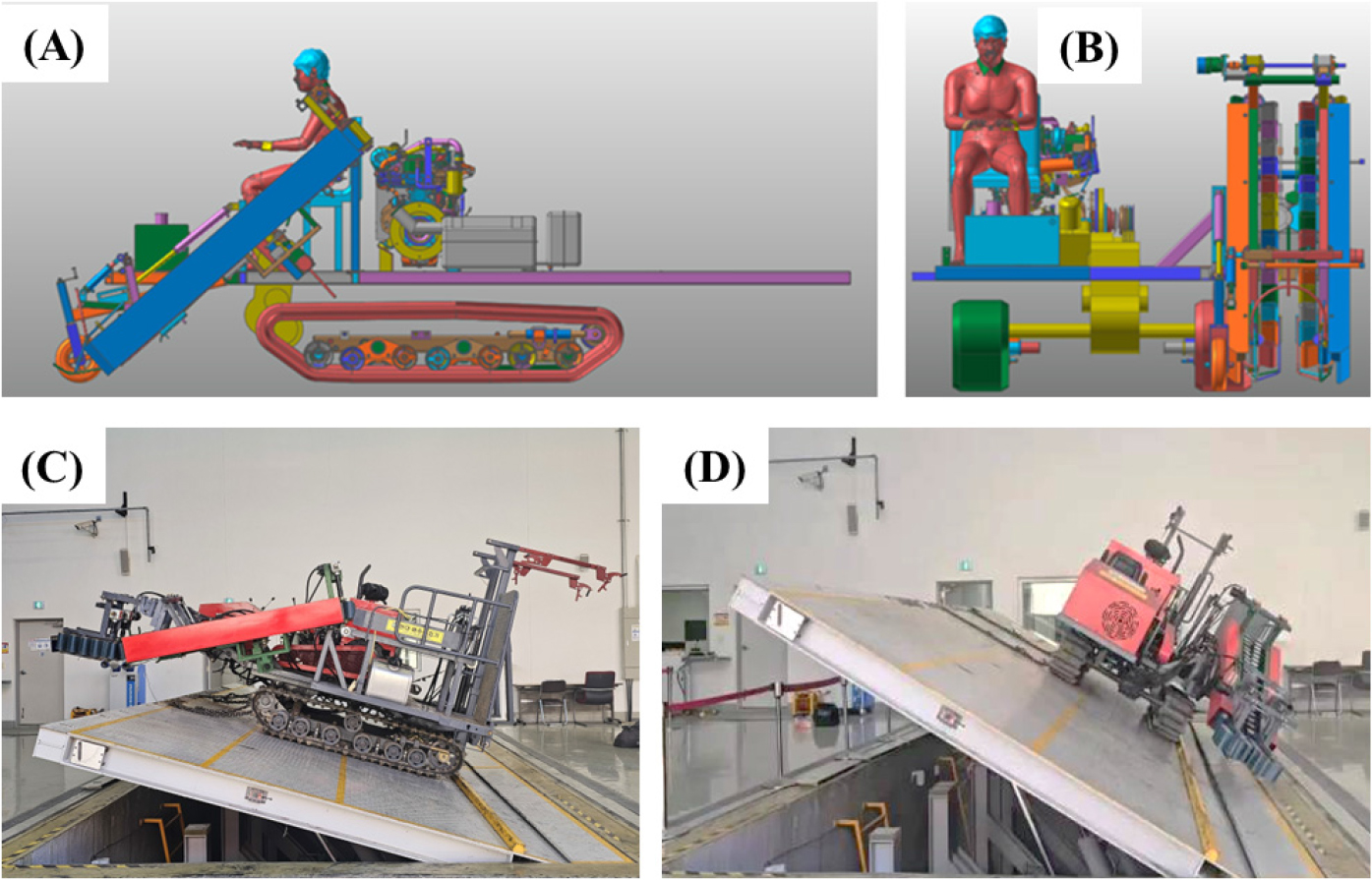
To verify the reliability of the simulation-based stability analysis, experimental overturning tests were conducted at the Foundation of Agricultural Technology Commercialization and Transfer in Iksan, Republic of Korea (Fig. 3(C) and (D)). The experimental setup was designed to replicate the key conditions considered in the numerical simulations while accounting for practical constraints of the test facility. Both lateral (left and right side) and longitudinal (front and rear) overturning scenarios were considered, as these represent critical rollover modes encountered during cross-slope travel and operation on inclined terrain.
For each test configuration, the harvester was gradually inclined until the onset of overturning was observed, and each condition was repeated three times to improve measurement reliability and reduce experimental uncertainty. The validation tests were conducted under the same load conditions and structural configurations used in the simulations to ensure consistency between numerical and experimental evaluations. This combined assessment of lateral and longitudinal overturning provided a comprehensive basis for validating the simulation methodology and for identifying rollover limits of the cabbage harvester under realistic operating configurations.
Dynamic turning simulation under lateral slope conditions
To evaluate the influence of dynamic operating conditions on rollover tendency, an additional dynamic turning simulation was conducted using the validated RecurDyn MBD model. The simulation was designed to represent practical operating conditions of the self-propelled cabbage harvester, including lateral field slopes, low-to-maximum travel speeds, and two loading conditions: unloaded and 500 kg loaded. The same harvester geometry, mass properties, center-of-gravity coordinates, crawler configuration, and payload conditions used in the static rollover analysis were also applied in this simulation. The simulation represented steady turning on lateral slopes. During turning, centrifugal force acts outward from the turning center. In this study, the centrifugal force was applied toward the downhill direction to represent a conservative operating condition. Under this condition, the centrifugal force and the downslope component of gravity act in the same lateral direction, increasing the overturning moment and reducing the rollover stability margin.
The slope angles were set to 5, 10, 15, and 20°. These values were selected to represent mild to severe uneven-field conditions while remaining below the static lateral rollover angles obtained in this study. In Korean cabbage cultivation, fields commonly include ridges and furrows, with ridge heights of approximately 100 - 300 mm, ridge widths of 500 - 900 mm, and furrow widths of 200 - 630 mm, indicating that the harvester may encounter uneven field geometry during operation (Ali et al., 2024; Reza et al., 2025). Therefore, the selected slope range was used to evaluate dynamic stability under subcritical but practically relevant uneven-field conditions.
Travel speeds of 0.5, 1.0, 2.0, and 3.0 m·s-1 were used. The lower speeds represented low-speed harvesting operation, whereas 3.0 m·s-1 corresponded to the maximum travel-speed condition of the machine. Including the maximum speed allowed the simulation to evaluate a conservative upper-bound dynamic condition. This speed range was also selected because centrifugal acceleration increases with the square of travel speed; therefore, even moderate increases in speed can substantially increase the lateral overturning tendency during turning.
A constant turning radius of 5.2 m was applied based on the overall machine length of the harvester, which was 5.20 m. This radius was selected to represent a sharp but feasible headland turning condition without assuming an unrealistically small pivot turn. Since the actual measured turning radius was not available, using a radius equal to the machine length provided a geometry-based and reproducible assumption for comparing dynamic stability under different speed and slope conditions.
During steady turning, the lateral acceleration was calculated as follows:
where, is the lateral acceleration, is the travel speed, and is the turning radius. The corresponding centrifugal force was calculated as follows:
where, is the centrifugal force and is the total mass of the harvester under each load condition. These equations are standard vehicle-dynamics relationships for constant-radius turning motion and are commonly used to describe lateral acceleration and turning-induced force (Gillespie, 2021). In the RecurDyn model, the calculated centrifugal force was applied at the measured CoG of the harvester in the downhill lateral direction. To prevent artificial impact at the beginning of the simulation, the force gradually increased from zero to the target value during the first 2 s and then maintained until the end of the simulation.
Rollover tendency was evaluated using the vertical reaction force of the uphill crawler track. The onset of rollover was defined as the condition in which the vertical reaction force of the uphill crawler track approached zero, indicating loss of ground contact. Similar dynamic rollover studies have used wheel or track reaction force, slope angle, speed, and rollover occurrence as key outputs for evaluating agricultural vehicle stability (Jang et al., 2022a). A stability index was calculated as follows:
where, is the stability index, is the minimum vertical reaction force of the uphill/inner crawler track during dynamic turning, and is the vertical reaction force of the same crawler track under the corresponding static slope condition without centrifugal force. A lower stability index indicates a reduced rollover stability margin. The simulation conditions are summarized in Table 2.
Table 2.
Simulation conditions for dynamic turning analysis.
Field evaluation of in-operation dynamic stability
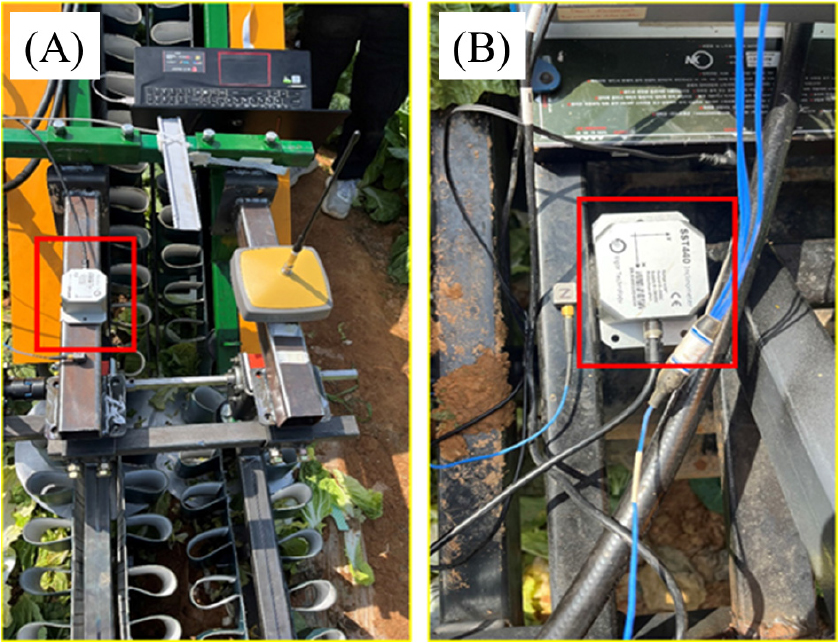
Dynamic stability of the one-row self-propelled cabbage harvester was assessed during field harvesting using an inclination monitoring sensor (model: SST400; Shanghai Vigor Technology Development Co., Ltd., China). The inclinometer measured inclination angles along the longitudinal (X-axis) and lateral (Y-axis) directions to characterize the dynamic response of the harvester during field operation. Data acquisition and test control were performed using a commercial customized program (NI, 2020), which had been verified prior to the field trials to ensure stable sensor interfacing, synchronized sampling, and reliable data logging. Inclination signals were recorded at 100 Hz, providing adequate temporal resolution to capture short-duration attitude fluctuations caused by localized terrain irregularities and machine motion.
One inclinometer was mounted on the main structural frame to evaluate overall vehicle-level dynamic stability, including pitching and rolling behavior induced by terrain irregularities and forward motion. A second inclinometer was installed on the harvesting unit to quantify localized inclination variations associated with ground contact, crop interaction, and structural compliance of the front-mounted working unit. This dual-sensor configuration enabled simultaneous assessment of global machine motion and localized dynamic behavior during operation.
Field tests were performed under representative harvesting conditions on soil surfaces at practical operating speeds. Each test condition was repeated three times to ensure measurement repeatability and reduce experimental uncertainty. The recorded inclination time series were subsequently used to quantify in-field dynamic stability characteristics of the harvester. The test configuration and sensor mounting locations are shown in Fig. 4.
Analytical procedures
Inclination data collected during field operation were analyzed to quantify the dynamic stability behavior of the self-propelled cabbage harvester during harvesting operations. Longitudinal and lateral inclination signals from both the harvesting unit and the main structural frame were first screened to detect non-physical values, signal dropouts, and measurement artifacts. Minimal preprocessing was applied to preserve the original dynamics, including removal of extreme outliers outside physically plausible inclination ranges and interpolation across short data gaps to maintain continuity.
Dynamic stability was evaluated using time-domain statistical indices calculated from the processed inclination signals. For a processed inclination signal , where is the inclination angle at the -th sample and is the total number of samples, the mean inclination angle was calculated as:
The standard deviation (SD), representing the variability of the inclination response, was calculated as:
The root mean square (RMS), representing the overall magnitude of the inclination response, was calculated as:
The maximum and minimum inclination angles were obtained as the largest and smallest values in the processed signal, respectively. These time-domain statistical indices are commonly used to describe the central tendency, variability, and overall magnitude of measured dynamic signals in experimental data analysis (Bendat and Piersol, 2011). Data processing and visualization were conducted using Microsoft Excel and Python-based open-source tools to support transparent and reproducible analysis. The resulting statistics were used to compare inclination behavior between the harvesting unit and the main structural frame under representative field conditions.
Results and Discussion
Center of gravity characteristics and stability implications
The CoG of the self-propelled one-row cabbage harvester was calculated using Eqs. (3), (4), (5), (6). Under unloaded conditions, the total mass of the machine was approximately 2,200 kg. When an additional payload of 500 kg was applied to represent harvested cabbage and associated operational components, the total mass increased to approximately 2,700 kg. Under both loading conditions, the left–right mass distribution remained nearly symmetrical, indicating that the harvester exhibited minimal inherent lateral imbalance under static conditions.
As summarized in Table 3, the unloaded CoG coordinates were Xc = 1,980 mm in the longitudinal direction, Yc = -255 mm in the lateral direction, and Zc = 806 mm in the vertical direction. Under the loaded condition, the longitudinal CoG position remained nearly unchanged (Xc = 1,975 mm), whereas the lateral CoG shifted toward the downslope direction (Yc = -230 mm) and the vertical CoG increased (Zc = 845 mm), reflecting payload-induced mass redistribution. Comparable CoG shifts under harvesting loads have been reported for compact vegetable harvesters and tractor-mounted collection systems, where added payload increases the vertical CoG and reduces stability margins (Ali et al., 2021; Jang et al., 2024). From a stability standpoint, upward and lateral displacement of the CoG reduces the restoring moment during cross-slope operation and increases rollover susceptibility, consistent with established rollover mechanics (Wang et al., 2024; Karaca et al., 2026).
Table 3.
Coordinates of the center of gravity of the self-propelled cabbage harvester with and without load conditions.
| Coordinates | Unloaded conditions (mm) | Loaded conditions (mm) |
| Xc | 1,980 | 1,975 |
| Yc | -255 | -230 |
| Zc | 806 | 845 |
Overturning characteristics under different load conditions
Fig. 5 summarizes the overturning limit angles obtained from the MBD simulations and experimental validation for the unloaded and loaded conditions. Under the unloaded condition, the simulations predicted lateral overturning limit angles of 38.23° on the right side and 34.18° on the left side, whereas the longitudinal overturning limits were 27.92° at the front and 22.41° at the rear. The corresponding inclination tests produced lower overturning angles of 30.12° (right), 30.90° (left), and 15.37° (rear), respectively. Although the experimental limits were smaller than the simulated values, particularly in the rear direction, both approaches consistently indicated that longitudinal overturning occurred at lower inclination angles than lateral overturning. Such simulation–experiment differences have been reported for compact harvesting machinery and are commonly attributed to compliance effects, localized ground–track interactions, and structural flexibility not fully represented in rigid-body models (Chowdhury et al., 2020; Kim et al., 2022).
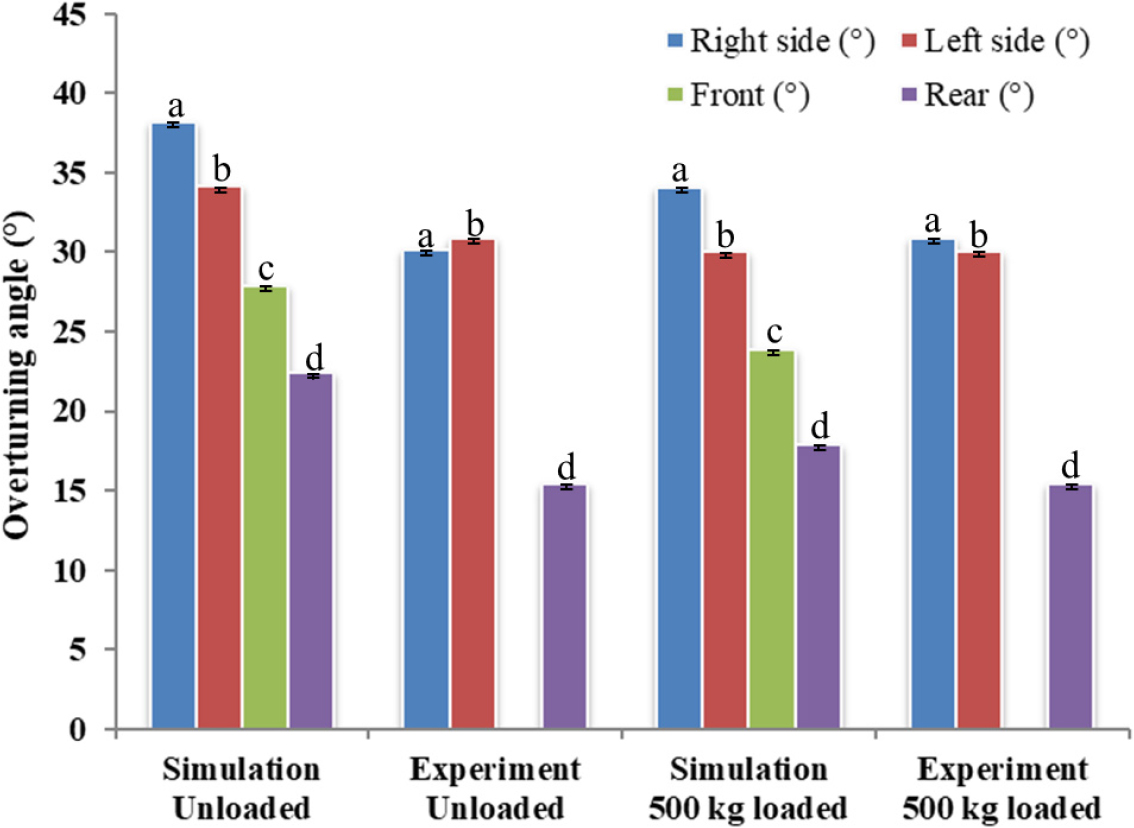
Introducing a 500 kg payload reduced the overturning limits in both simulation and experiment. The simulated overturning angles decreased to 34.11° (right), 30.07° (left), 23.88° (front), and 17.94° (rear), while experimental measurements showed 30.89° (right), 30.09° (left), and 15.46° (rear). The larger reductions in the front and rear directions indicate that payload-induced CoG changes primarily degraded longitudinal stability. Similar load-dependent decreases in overturning limits have been reported for self-propelled and tractor-mounted harvesting systems, where increased payload elevates the vertical CoG and increases susceptibility to rearward overturning (Jang et al., 2022b; 2024). In contrast, the relatively higher lateral limits observed here are attributed to the wide crawler-track support, which increases lateral resistance to overturning even under increased load (Kim et al., 2022). For safety and equipment protection reasons, the front-direction inclination tests were not continued to an actual rollover for either load condition; therefore, only simulation-based front overturning limits were explained. The overturning angle results were additionally summarized in Table 4 to clearly compare the simulation and experimental results under unloaded and 500 kg loaded conditions.
Table 4.
Overturning angle results of the self-propelled cabbage harvester under unloaded and 500 kg loaded conditions.
Dynamic turning simulation results under lateral slope conditions
The dynamic turning simulation was conducted to evaluate the effect of travel speed and turning-induced centrifugal force on the rollover tendency of the self-propelled cabbage harvester under lateral slope conditions. The simulation results are summarized in Table 5, and the variation in the minimum vertical reaction force of the uphill crawler track according to travel speed is shown in Fig. 6. The selected scenario represents a conservative operating condition in which centrifugal force acts toward the downhill direction during turning, thereby increasing the lateral overturning moment.
Table 5.
Dynamic turning simulation results of the self-propelled cabbage harvester under different slope, speed, and loading conditions.
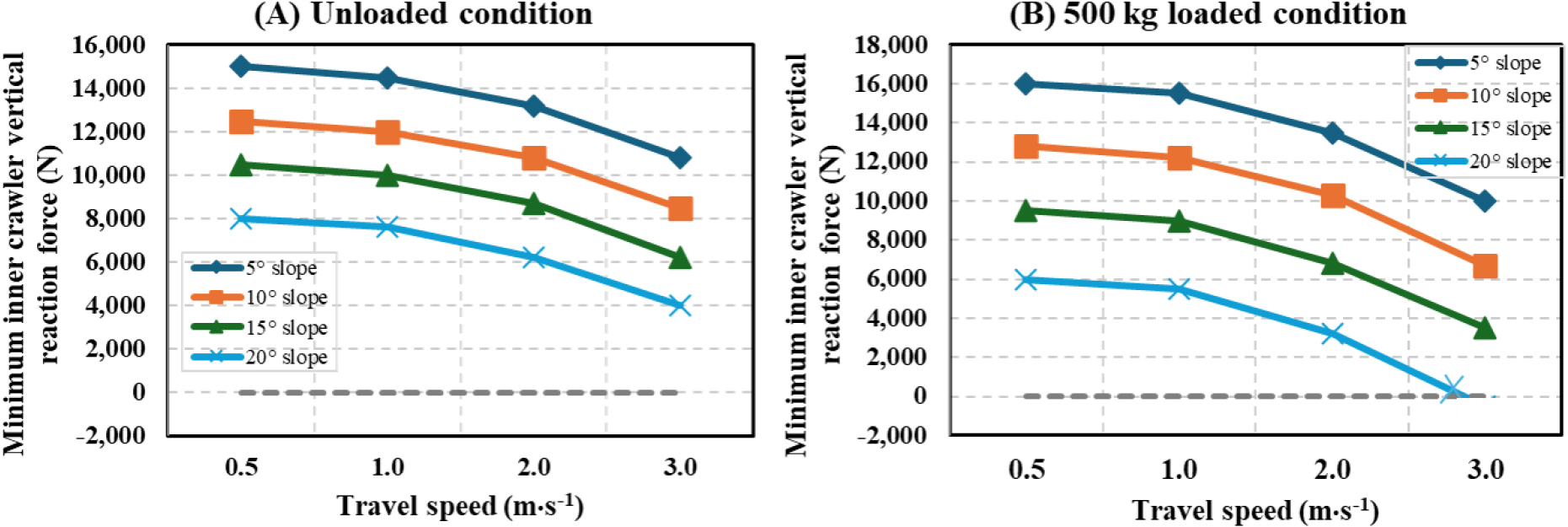
As travel speed increased, the minimum vertical reaction force of the uphill crawler track decreased under all slope conditions. This trend indicates that the lateral stability margin was reduced by the combined effect of slope-induced gravitational moment and speed-dependent centrifugal force. The decrease in the inner crawler reaction force was relatively small at lower travel speeds of 0.5 and 1.0 m·s-1, suggesting that the harvester maintained sufficient crawler-ground contact during low-speed turning. However, the reduction became more evident at 2.0 and 3.0 m·s-1, particularly under the 15° and 20° slope conditions. This result can be explained by the relationship between travel speed and lateral acceleration during constant-radius turning, where lateral acceleration increases in proportion to the square of travel speed (Gillespie, 2021). Therefore, a moderate increase in travel speed can produce a comparatively large increase in the lateral overturning effect.
The loaded condition showed a lower stability margin than the unloaded condition. Under the 500 kg loaded condition, the minimum inner crawler reaction force decreased more rapidly as travel speed and slope angle increased. This result indicates that payload-induced mass redistribution increased the lateral overturning tendency during turning. Although the crawler undercarriage provided effective lateral support under low-speed conditions, the dynamic simulation confirmed that the stability margin can be reduced when payload, slope, and turning-induced centrifugal force act simultaneously. This finding is consistent with previous agricultural vehicle rollover simulation studies, which reported that dynamic factors such as slope, travel speed, and disturbance conditions can reduce the critical stability margin compared with static conditions (Jang et al., 2022a).
The stability index decreased with increasing slope angle and travel speed, indicating a reduction in lateral stability margin during turning. Lower stability index values were associated with reduced uphill crawler reaction force and increased rollover tendency. Since rollover onset occurs when the normal reaction force at the uphill wheel or crawler approaches zero, the minimum vertical reaction force of the inner crawler track was used as the main indicator of dynamic rollover risk, consistent with stability-assessment principles for self-propelled agricultural machinery under intended and foreseeable operating conditions (Majdan et al., 2021). Overall, the results showed that rollover behavior was affected not only by the static center-of-gravity position and slope angle but also by speed-dependent lateral acceleration during turning. Therefore, sharp turning at high speed should be avoided on sloped or uneven field surfaces, especially under loaded conditions, and headland turning should be performed at reduced speed to maintain sufficient crawler-ground contact.
The dynamic turning simulation showed that lateral stability decreased as slope angle and travel speed increased, as indicated by the reduction in the minimum vertical reaction force of the uphill crawler track. This trend is mechanically reasonable because lateral acceleration during constant-radius turning increases with the square of travel speed; therefore, higher speed produces greater centrifugal force and larger lateral load transfer toward the downhill crawler (Gillespie, 2021). Similar rollover studies on agricultural tractors reported that slope angle, speed, obstacle excitation, and other disturbance conditions can reduce the critical stability margin and increase rollover tendency (Han et al., 2023). The 500 kg loaded condition showed a greater reduction in inner crawler reaction force than the unloaded condition, indicating that payload-induced center-of-gravity shift further increased the overturning moment during turning. The use of inner crawler vertical reaction force and stability index is also supported by previous off-road vehicle and tractor rollover studies, where stability indices and ground-contact-related variables were used to evaluate rollover tendency under dynamic field conditions (Gao et al., 2022). Therefore, the results suggest that static inclination analysis alone may not fully represent field rollover risk, and that low-speed headland turning should be maintained on sloped or uneven terrain, particularly under loaded harvesting conditions.
Asymmetric loading should be considered an additional operational risk factor for one-row cabbage harvesters because harvested cabbage may accumulate unevenly in the hopper during field operation. If the crop mass shifts toward one side, the overall center of gravity moves laterally toward the loaded side, reducing the stability margin on slopes and during turning. Previous studies and safety references on agricultural machinery indicate that changes in load position, implement mass, and center-of-gravity location can directly affect rollover stability, particularly when the machine operates on slopes or experiences turning-induced centrifugal force (Liu and Ayers, 1999; Wang et al., 2024). In addition, implement-induced center-of-gravity shifts have been reported to reduce tractor rollover stability under sloped operating conditions (Karaca et al., 2026). In the present study, the 500 kg payload was assumed to be uniformly distributed; therefore, side-concentrated cabbage loading was not directly simulated. However, from a mechanical viewpoint, asymmetric loading would increase the vertical load on the loaded/downhill crawler and decrease the normal reaction force of the uphill crawler, thereby increasing the possibility of crawler lift-off and lateral rollover. Future work should include asymmetric payload simulations based on measured hopper geometry and actual crop accumulation patterns to quantify the worst-case lateral stability limit.
Dynamic inclination response during field operation
Fig. 7 present the time-domain inclination responses of the harvesting unit and the main structural frame in the longitudinal and lateral directions during field operation, with the corresponding statistical indicators summarized in Table 6. In the longitudinal direction, the harvesting unit exhibited a mean inclination with a relatively higher variability (mean = 5.52°, SD = 4.95°) than the main structural frame (mean = 7.01°, SD = 3.67°). This indicates that the front working module is more responsive to localized terrain irregularities and crop-soil interaction, whereas the main frame provides comparatively steadier support for the overall vehicle. In contrast, lateral inclination remained small for both components, with mean values below 1°, indicating stable side-to-side behavior under the tested operating conditions.
The inclination time histories contain intermittent sharp peaks and sudden drops in inclination, which correspond to transient disturbances such as localized uneven ground, short-duration changes in track-soil interaction, or momentary impacts during harvesting. These events were isolated and rapidly attenuated, suggesting no sustained loss of stability. Consistent with this interpretation, the reported maximum and minimum values reflect instantaneous deviations rather than persistent operating states. The RMS values in the longitudinal direction (≤ 7.91°) and in the lateral direction (≤ 3.08°) further indicate that the measured dynamics were dominated by bounded, low-amplitude oscillations during normal operation.
These findings are consistent with previous field studies of tracked agricultural vehicles on irregular terrain. Mizushima et al. (2011) showed that inclinometer-based pitch and roll measurements capture terrain-induced attitude disturbances and provide practical indicators of in-field machine behavior. Similarly, Chen et al. (2024) reported that measured inclination responses of tracked vehicles on slopes aligned well with simulation trends, supporting inclination as a useful proxy for stability under varying ground conditions. Jang et al. (2024) further demonstrated that time-domain inclination analysis captures transient tilt events that are not fully represented by static stability indices, highlighting its value for operational safety evaluation. Overall, the present results support the use of time-domain inclination monitoring as a robust and field-deployable approach for assessing dynamic stability of compact self-propelled harvesters operating on uneven terrain.
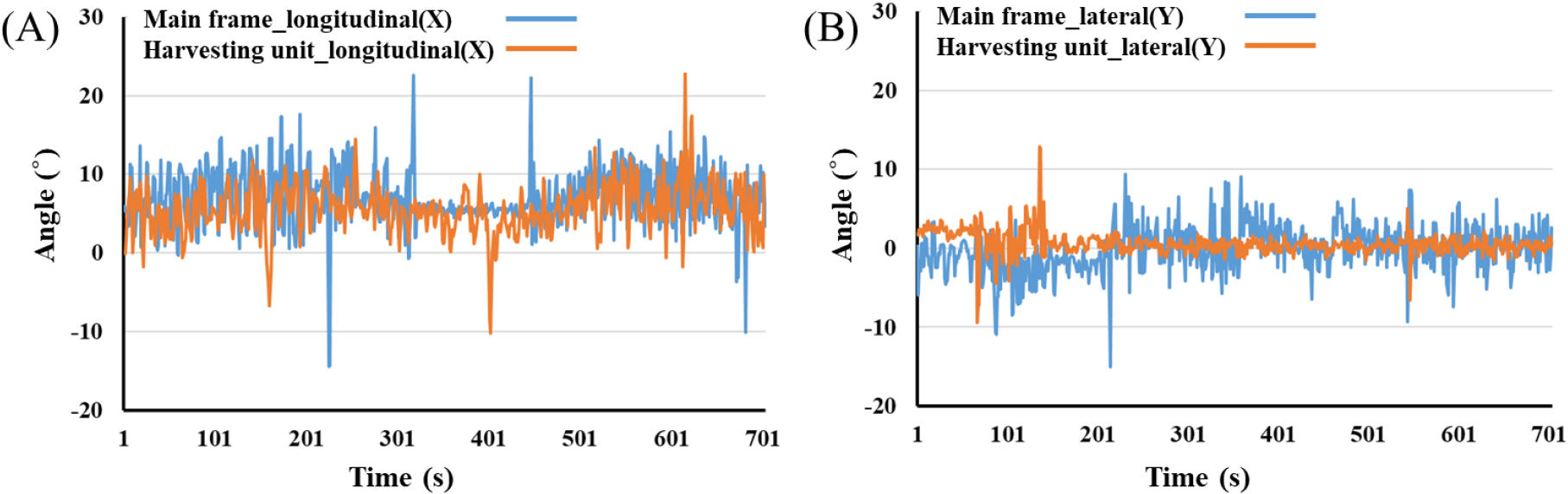
Table 6.
Statistical characteristics of time-domain inclination angles for the harvesting unit and main structural frame.
To improve the practical applicability of the stability analysis, a safety matrix was developed based on the static rollover results and dynamic turning simulation (Table 7). The matrix summarizes the recommended maximum working slopes according to travel speed and payload condition. Since rollover tendency increased with travel speed, slope angle, and payload, lower working slopes are recommended for higher-speed operation and loaded conditions. The safety matrix provides simple field-level guidance for operators and farmers when selecting safe travel speeds and turning conditions during cabbage harvesting.
Table 7.
Practical safety matrix for field operation of the self-propelled cabbage harvester.
Conclusion
This study evaluated the static and dynamic stability of a self-propelled one-row cabbage harvester using a combined approach of numerical simulation, experimental validation, and field-based inclination monitoring. The CoG was determined following standardized procedures, and rollover behavior was analyzed under unloaded and 500 kg loaded conditions to identify critical overturning behaviors in both lateral and longitudinal directions. The simulations indicated consistently higher lateral rollover resistance than longitudinal resistance, and the inclination tests reproduced the same directional stability trends under controlled conditions.
Field-based dynamic inclination measurements provided further insight into the operational stability of the machine during harvesting. Time-domain analysis showed that the harvesting unit exhibited greater inclination variability than the main structural frame, particularly in the longitudinal direction, reflecting increased sensitivity to localized terrain irregularities and crop–soil interaction. Lateral inclination responses remained small for both components, indicating stable side-to-side behavior under the tested conditions. Although transient peaks occurred due to localized disturbances, they were brief and rapidly attenuated, and the RMS values indicated that the overall response was dominated by bounded, low-amplitude oscillations rather than sustained instability.
Overall, the results demonstrate that payload-induced mass redistribution primarily degrades longitudinal stability, whereas the crawler undercarriage provides effective resistance against lateral overturning. In addition, the study confirms that time-domain inclination monitoring offers a practical, field-deployable method for evaluating dynamic stability of compact harvesters. These findings provide an evidence base for safety assessment, operating-limit guidance, and design optimization of self-propelled cabbage harvesters intended for uneven agricultural terrain.
This study has several limitations that should be acknowledged. First, the stability evaluation was conducted using a single configuration of a self-propelled one-row cabbage harvester. Therefore, the findings may not be directly generalizable to other harvester models, structural layouts, or undercarriage systems. Second, the analysis considered only two loading conditions, namely unloaded and 500 kg loaded states. Intermediate payload levels and higher loading conditions were not evaluated, although they may influence the position of the CoG and the resulting stability margin. Third, field-based inclination monitoring was performed under selected terrain and operating conditions. As a result, the measurements may not fully represent the wide range of slope gradients, soil conditions, travel speeds, and crop-residue distributions encountered during practical harvesting operations.
In addition, front-direction experimental rollover tests were not extended to complete overturning because of safety considerations and the need to prevent equipment damage. Future studies should expand the stability assessment by incorporating additional payload levels, a wider range of terrain slopes, different soil surface conditions, and repeated field trials under diverse harvesting environments. Further investigation is also required to evaluate the effects of travel speed, turning motion, crop loading pattern, and operator movement on the dynamic stability of cabbage harvesting machinery. These improvements would support more reliable safety assessment, operating-limit guidance, and design optimization of self-propelled cabbage harvesters for uneven agricultural terrain.
