

Introduction
Challenges of sweet potato harvesting
Classification of sweet potato harvesters
Recent technology trends
Commercialization trends
Future perspectives and research needs
Conclusion
Introduction
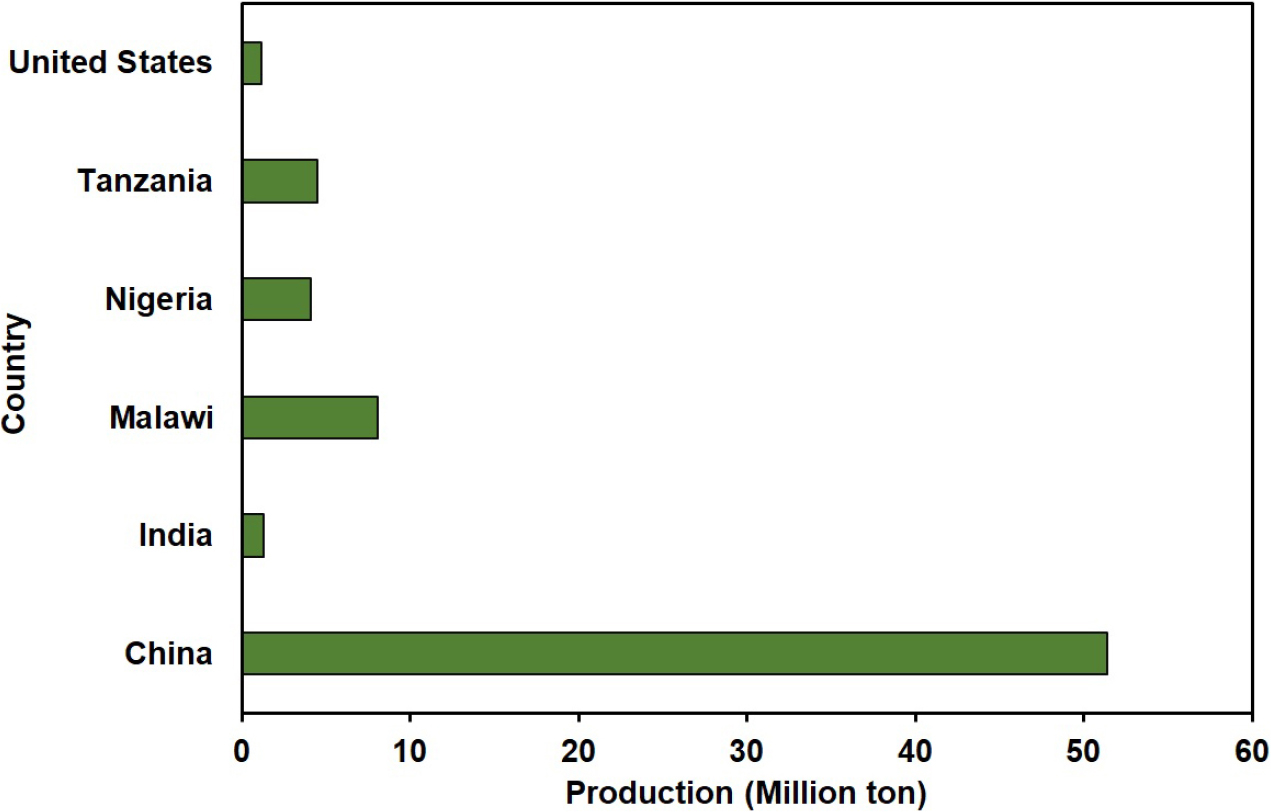
Sweet potato (Ipomoea batatas L.) is a major root crop increasingly favored by farmers due to its strong adaptability to marginal soils and resilience against pests and diseases (Won et al., 2024). It produces higher yields per unit area than many staple cereals, including rice, wheat, and maize (Lee et al., 2025). Global sweet potato production has garnered increasing attention due to its potential to enhance food security and contribute to sustainable agricultural systems (Devaux et al., 2014). Sweet potatoes are widely cultivated, with China alone planting over 3 million hectares and producing more than half of the world supply (Mu et al., 2022). Mechanization efforts have evolved from simple digging and conveying devices to integrated combine harvesters and automated sorting systems. Sweet potato ranks as the fifth most important food crop in developing countries based on fresh weight, following rice, wheat, maize, and cassava (Srinivas, 2009). In 2022, global production reached approximately 119 million tons, underscoring the growing significance of this crop within the global agricultural sector (FAO, 2022).
Sweet potato cultivation is concentrated primarily in developing nations, with China serving as the dominant producer, accounting for nearly 85% of total world output (Srinivas, 2009). As illustrated in Fig. 1, China alone produced 51.4 million tons, far exceeding the yields of any other country (FAO, 2022). Other major producers include Nigeria, Uganda, and Indonesia, where sweet potato serves as a vital staple food and a key source of rural income and livelihood (Sugri et al., 2017). Collectively, these countries produce tens of millions of tons annually, highlighting the crop critical role in regional food security and emphasizing the potential impact of improved mechanization and harvesting technologies on production efficiency and sustainability.
The increasing global production of sweet potato is accompanied by substantial regional differences in cultivation and harvesting practices, particularly across developing regions such as Asia and Sub-Saharan Africa (Andrade et al., 2009). In these areas, sweet potato harvesting remains predominantly manual, a process that is labor-intensive, time-consuming, and often inefficient, contributing to high post-harvest losses and reduced economic returns (Andrade et al., 2009). Manual harvesting also demands considerable physical effort and time, leading to productivity constraints during peak harvest periods (Andrade et al., 2009; Gurmu, 2019).
Moreover, the declining availability of agricultural labor in rural regions has intensified the need for effective mechanization solutions (Wu et al., 2025). The adoption of mechanical harvesting technologies offers significant advantages, including reduced labor dependency, improved harvesting precision, minimized tuber damage, and enhanced operational efficiency and profitability (Padhiary and Kumar, 2025; Wu et al., 2025). As a result, the development and deployment of efficient sweet potato harvesting machinery are becoming increasingly vital for ensuring sustainable production and supporting the modernization of root crop farming systems.
Recent advancements in sweet potato harvester development have demonstrated significant potential to enhance productivity, profitability, and sustainability by optimizing energy use and minimizing post-harvest losses (Johnson and Cheein, 2023). Contemporary research trends reveal increasing innovation in mechanical structures, automation, and sensing technologies (Zhang, 2015). Modern harvester designs increasingly incorporate hydraulic or pneumatic actuation systems to enable smoother digging and conveying operations, coupled with control mechanisms using sensors for precise depth adjustment and crop detection (Zhang, 2015). Additionally, the integration of advanced technologies such as machine vision, global positioning system (GPS) guidance, and machine learning is facilitating intelligent decision-making and adaptive control under diverse soil and ridge conditions (Padhiary and Kumar, 2025). These developments represent a broader transition toward smart, data-driven mechanization systems that merge mechanical efficiency with digital intelligence, thereby paving the way for next-generation sweet potato harvesting solutions (Wei, 2024).
Mechanization thus presents a promising pathway for improving the efficiency, sustainability, and scalability of sweet potato production (Wei, 2024). The global expansion of sweet potato cultivation has intensified the demand for more efficient and automated harvesting systems capable of addressing labor shortages and enhancing operational productivity (Peng et al., 2024a). Despite this growing interest, the commercialization of sweet potato harvesters remains limited. Over the past decades, numerous prototypes and semi-mechanized models have been developed, yet only a small number have achieved widespread production or practical field application. Major barriers to commercialization include high manufacturing costs, insufficient adaptability to varying soil textures and ridge geometries, and the potential for tuber damage during operation (Fang et al., 2025). These challenges highlight the need for continued innovation to ensure that harvesting equipment performs reliably under diverse field conditions.
Economic factors also play a pivotal role in driving mechanization. Labor shortages, rising wage rates, and the aging agricultural workforce are compelling farmers to adopt mechanized harvesting solutions as a means to sustain productivity and reduce costs (Berdegué et al., 2025). Countries such as Japan, Republic of Korea, and China have made considerable progress in both the development and commercialization of sweet potato harvesters (Katayama et al., 2017; Peng et al., 2024b). Several manufacturers have introduced compact, self-propelled harvesters designed for small- and medium-scale farms, demonstrating strong potential for future market expansion.
However, achieving successful commercialization will require enhanced collaboration among research institutions, equipment manufacturers, and end-users to ensure that newly developed technologies are cost-effective, field-adaptable, and user-oriented (Gamage et al., 2024; Kim et al., 2025b). Understanding these technological and market trends is critical for guiding future research and fostering sustainable mechanization within the sweet potato industry (Kim et al., 2025b). Accordingly, the objective of this review was to provide a comprehensive assessment of the current research progress and commercialization status of sweet potato harvesters.
Challenges of sweet potato harvesting
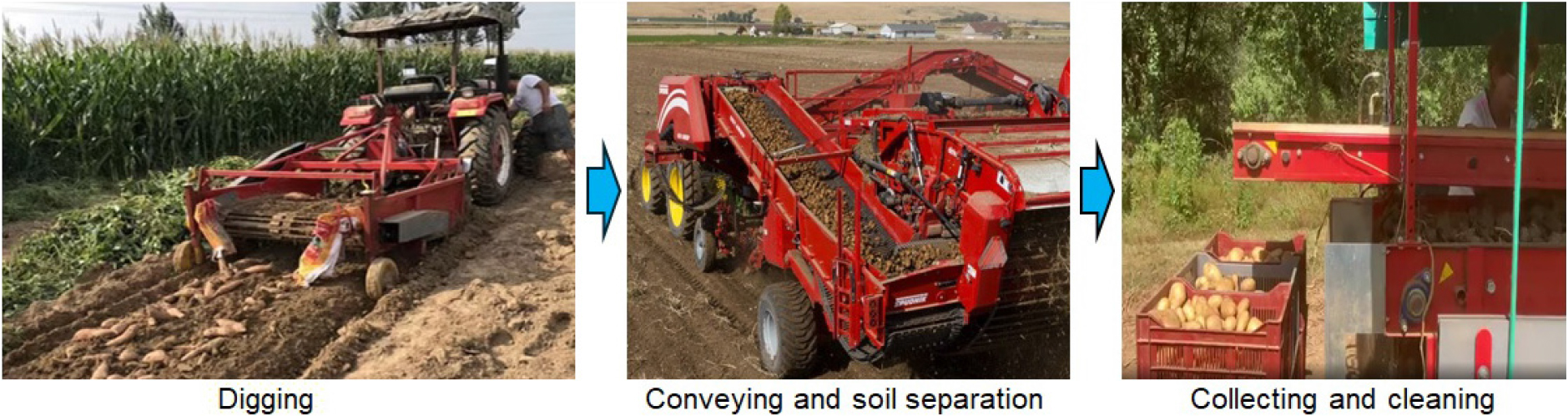
Sweet potato harvesting involves a series of operations designed to extract tubers from the soil while minimizing physical damage and post-harvest losses. Fig. 2 shows the different steps of sweet potato harvesting process. The process typically begins with vine cutting or removal, followed by soil loosening and digging using mechanical blades or lifting tools to expose the tubers (Won et al., 2024). The next stage involves conveying and separating the harvested roots from soil and debris, often through vibrating or belt-type systems. Finally, the tubers are collected, sorted, and transported for storage or processing. Because sweet potatoes are delicate and easily bruised, maintaining gentle handling throughout each step is essential. The efficiency and success of this process largely depend on soil conditions, ridge geometry, and the type of harvesting machinery employed, making the development of optimized and adaptable harvesters a critical focus of ongoing research.
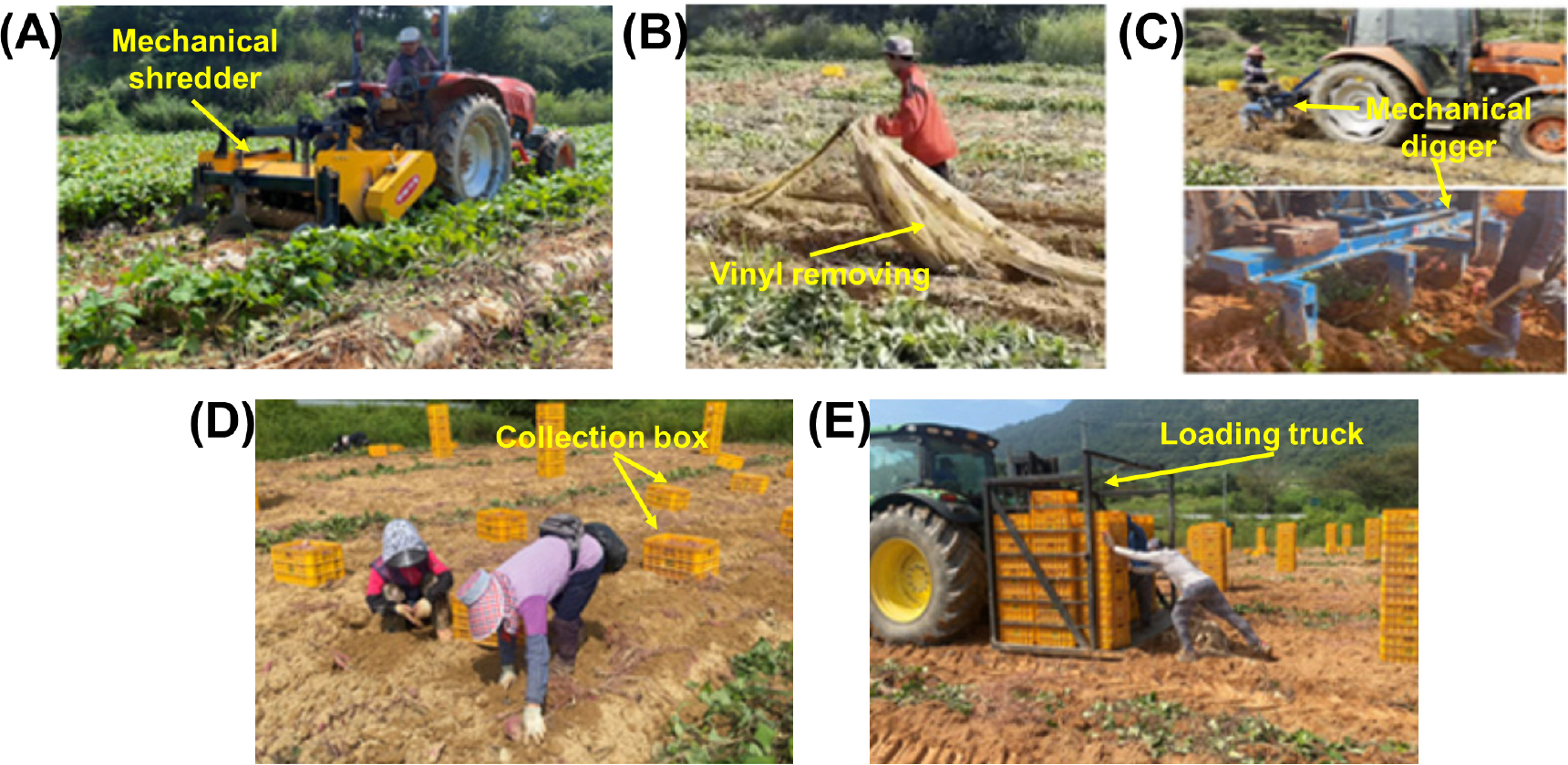
Fig. 2.
Sequential stages of the sweet potato harvesting process in the Republic of Korea: (A) mechanical shredding of plant vines, (B) manual vinyl removal, (C) soil digging using a mechanical digger, (D) manual collection and packaging of harvested tubers, and (E) loading of packed crates onto a transport vehicle (adapted from Won et al., 2024).
The harvesting of sweet potatoes presents several practical challenges that can significantly impact efficiency and yield (Smittle et al., 1974; Zhang et al., 2024b). Table 1. Summarizes the major challenges in the development of sweet potato harvesters. The table highlights issues such as mechanical damage, soil separation, and variability in field conditions. These challenges are primarily related to the risk of tuber damage, soil conditions, and variations in planting practices (Bao et al., 2021). One of the primary concerns is the risk of tuber damage during mechanical harvesting and post-harvest handling (Hayes et al., 2014; Bao et al., 2021). Sweet potato tubers are highly easy to bruise and surface abrasion due to collisions and impacts during digging and conveying (Hayes et al., 2014). Some studies have shown that factors such as drop height and collision material strongly influence the extent of mechanical injury, with specific threshold values for impact stress and force identified to minimize damage (Bao et al., 2021). Similarly, during handling and transport, sweet potatoes may suffer additional mechanical injuries that deteriorate quality and shorten storage life, particularly under bad temperature and handling conditions (Smittle et al., 1974).
Table 1.
Major challenges in sweet potato harvester and corresponding technological approaches.
|
Type of challenge |
Specific challenge |
Key influencing factors |
Impact on harvesting |
Research and technological approaches | References |
|
Mechanical and handling challenges |
Tuber impact and collision |
Drop height, collision surface, impact stress, and conveying vibration |
Surface bruising, cracking, and reduced storage quality |
Optimization of impact velocity; incorporation of soft or elastic materials in conveying units; cushioning and damping design for impact reduction | Smittle et al. (1974); Bao et al. (2021) |
|
Soil physical properties |
Excessive draft force and digging resistance |
Soil hardness, moisture content, and adhesion |
High power demand, tool wear, and root damage |
Blade angle optimization; vibration-assisted digging mechanisms; soil–tool interaction modeling for reduced draft resistance | Md Akhir et al. (2014); Gong and Yang (2023) |
|
Soil physical properties |
Strong soil–tuber adhesion |
High clay content, strong cohesion |
Incomplete tuber extraction; excessive friction and pressure on tubers |
Development of efficient soil separation, cleaning, and tuber recovery systems | Gong and Yang (2023) |
|
Technological and operational limitations |
High power demand, operational cost, and limited adaptability |
Field heterogeneity, energy requirements, and small-scale farm constraints |
Low adoption rates and high operational costs |
Design of compact, energy-efficient, and cost-effective harvester prototypes for small and medium-scale farms | Flores and Dela Cruz (2017); Gong and Yang (2023) |
Soil conditions also play a crucial role in determining harvesting performance (Rahman et al., 2025). The hardness, moisture content, and adhesion of the soil directly affect the draft force required for digging and the likelihood of tuber damage (Shaheb et al., 2021; Jeong et al., 2025; Rahman et al., 2025). Hard or excessively moist soils increase resistance to penetration, demanding higher power and potentially causing greater mechanical stress on the tubers (Gong and Yang, 2023). Furthermore, the strong adhesion between the tuber surface and the surrounding soil complicates the separation process, as high friction and pressure are often required to dislodge the roots, increasing the risk of injury (Gong and Yang, 2023). Another factor influencing harvesting efficiency is irregular planting depth and ridge variation, which lead to inconsistent digging performance across different cultivation regions (Kacheyo et al., 2024). Variations in ridge height and soil compaction make it difficult for mechanical harvesters to maintain optimal digging depth, often resulting in incomplete harvesting or tuber damage (Wang et al., 2014; Flores and Dela Cruz, 2017).
General agricultural machines, such as standard root or potato harvesters, are often not good for sweet potato harvesting because they are unable to handle the fragility and shapes of sweet potatoes (Peng et al., 2024a). This incapacity leads to significant damage and loss during the harvesting process (Mohamed et al., 2024). Hence, specialized designs have been developed to provide gentle handling, adaptive depth control, and efficient separation mechanisms tailored to sweet potato morphology (Won et al., 2024; Yang et al., 2024a). For instance, machines equipped with vibrating conveyor belts, rubber push plates, and flexible digging components have been shown to minimize impact stress and mechanical injury during extraction and transport (Cui, 2011; He et al., 2011). Adaptive depth control systems are another critical feature, allowing machines to adjust digging depth dynamically according to tuber distribution. Hydraulic lifting rods and adjustable depth wheels have proven effective in maintaining consistent harvesting depth and minimizing tuber breakage (Liu et al., 2015). The adaptability of machines to diverse soil types and cultivation conditions needed for engineering consideration. Adjustable ploughing blades, ground-breaking devices, and modular digging components enable machines to perform effectively in a wide range of soil textures, from light sandy soils to heavy clay environments (Chen, 2010; Cui, 2011).
Soil characteristics are a critical factor in the design and performance of sweet potato harvesting machinery because digging resistance, soil fragmentation, soil–tuber separation, clogging, and tuber damage are strongly affected by soil texture and moisture content (Kalinin et al., 2021). In sandy or loamy soils, separation is generally easier because soil particles are less adhesive and can pass through sieve bars or conveyor gaps with relatively low vibration intensity (Wang et al., 2024). In contrast, clay and high moisture soils show higher cohesion and adhesion, which increase draft force, soil sticking, clogging, and the risk of tuber bruising during (Li et al., 2020; Zhang et al., 2024b). Harvesters working in heavy or high viscosity soils require stronger digging components, reduced forward speed, and adjustable vibration intensity or variable frequency separation systems (Awuah et al., 2023). However, excessive vibration may increase skin abrasion and impact damage. Therefore, the optimum vibration setting should be determined according to soil moisture, soil adhesion, conveyor structure, and acceptable tuber damage level.
Additionally, for machinery to be practical for farmers, simplicity, reliability, and ease of maintenance are essential. Designs integrating differential mechanisms, transmission rods, and tractor-mounted systems enhance operational efficiency and reduce the need for additional equipment (Chen, 2010). Additionally, specialized machinery successfully addresses many technical challenges, but economic and logistical barriers still limit large-scale adoption. High production costs, maintenance requirements, and the need for technical training can discourage small-scale farmers from utilizing these machines (Ali et al., 2024; Reza et al., 2025). Therefore, ongoing research and innovation should focus on developing cost-effective, energy-efficient, and user-friendly harvesting systems that balance engineering sophistication with practical usability (Flores and Dela Cruz, 2017; Gamage et al., 2024).
Classification of sweet potato harvesters
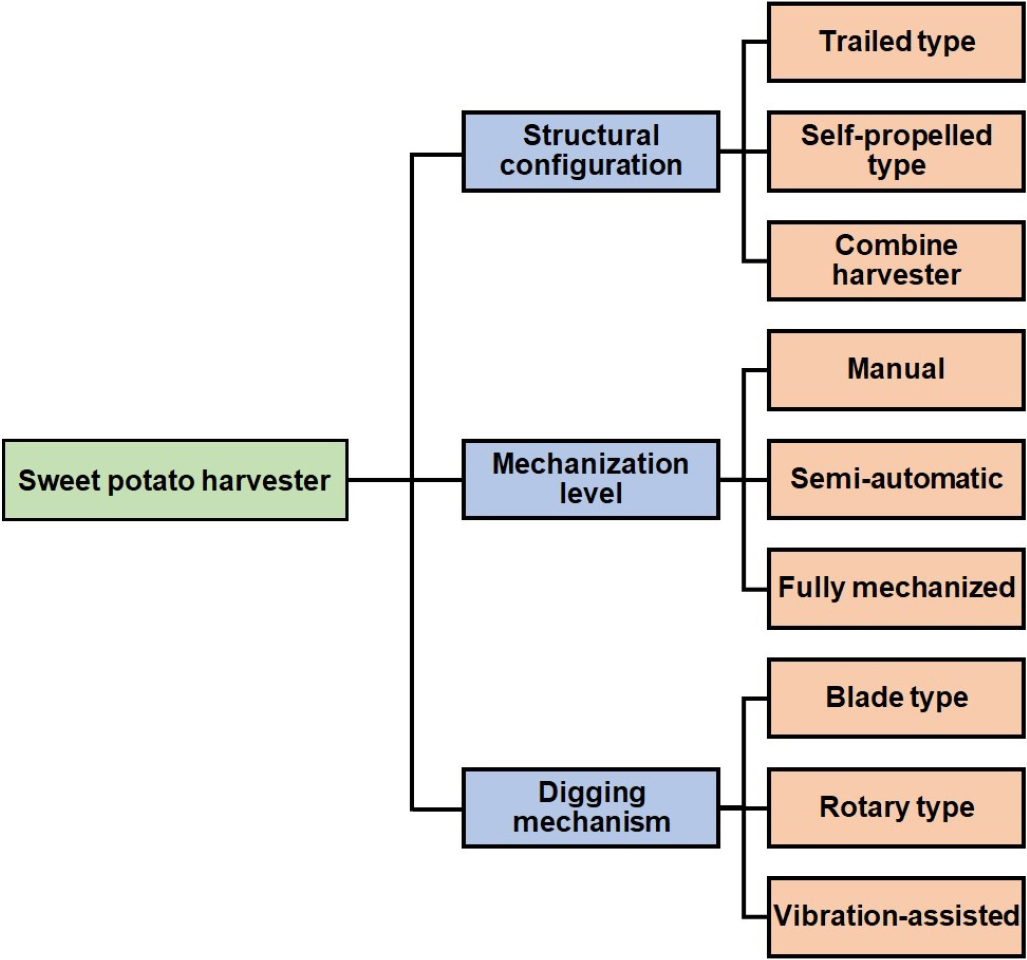
Sweet potato harvesters share core functions with other root and tuber crops, such as undercutting, lifting, soil separation, conveying, and (in advanced machines) cleaning, grading, and collection. Recent development trends favor compact, self-propelled, and highly integrated systems with higher automation, but many engineering concepts remain transferable from potato harvester research due to similar soil-tool interaction and separation requirements (Gong and Yang, 2023; Peng et al., 2024b). Because field conditions and production scale differ substantially, a clear classification helps compare design options and identify suitable configurations for specific contexts. Fig. 3. Illustrate that the classification of sweet potato harvesters can be organized according to their structural configuration, mechanization level, and digging mechanism (Cui, 2011; Flores and Dela Cruz, 2017; Du et al., 2019; Fang et al., 2025). Sweet potato harvesters can be organized along three practical axes: (i) structural configuration (trailed, self-propelled, combine-type), (ii) mechanization level (manual, semi-automatic, fully mechanized), and (iii) digging mechanism (blade, rotary, vibration-assisted). Each axis captures a different layer of design choice and strongly influences cost, throughput, tuber damage, and operational flexibility.
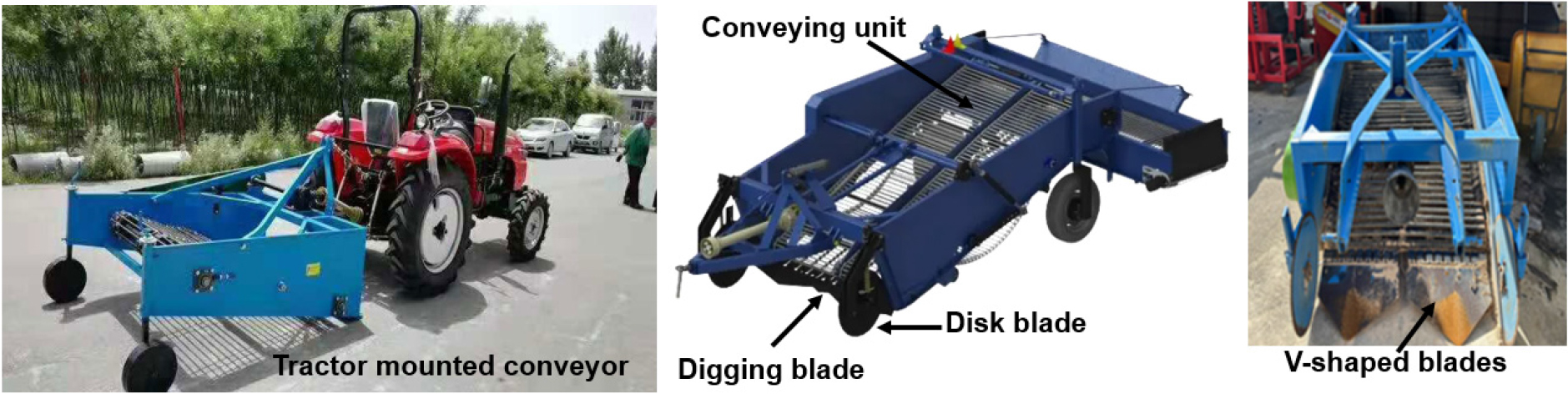
Trailed harvesters are tractor-mounted or tractor-pulled machines that rely on tractor drawbar traction and/or power take-off (PTO) to perform excavation and partial harvesting operations (He et al., 2011; Kosariya, 2023). In general, they undercut and lift tubers together with the surrounding soil, convey the crop–soil mixture for partial soil separation, and then discharge the material to the ground or a designated collection area (He et al., 2011). Their simple, modular structure makes them relatively affordable and therefore widely adopted on small- to medium-scale farms, especially in fields where access is constrained and turning space is limited. Typical configurations use passive digging tools, such as V-shaped shares, flat shares, or undercutting blades paired with mechanically simple belt, chain, or rod conveyors driven through PTO power transmission using chains, sprockets, and gears. A key design trade-off is the conveyor inclination: steeper angles tend to improve soil shedding but can increase drop height and impact damage, whereas shallower angles reduce impact yet may promote clogging and inadequate soil removal. Accordingly, recent improvement efforts have focused on integrating vibration-assisted digging or separation elements to reduce soil adhesion and excavation resistance while maintaining acceptable separation performance (Li et al., 2022; Fang et al., 2025). Fig. 4 shows the major components of a trailed sweet potato harvester.
Self-propelled harvesters integrate excavation, separation, conveying, and collection functions on an independent chassis, which generally provides higher operational stability and throughput than trailed systems (Du et al., 2019; Ju et al., 2023). They are typically aimed at medium- to large-scale production where labor savings and consistent field performance can justify the higher capital investment. To cope with variability in ridge geometry and soil conditions, many designs employ hydraulic depth-control mechanisms that regulate digging depth in real time to maintain uniform undercutting and reduce losses (Yang, 2015). For separation, vibrating digging components and multi-stage conveying webs or roller arrangements are commonly used to enhance soil removal, lower extraction resistance, and thereby mitigate mechanical damage risk during lifting and transport (Yang et al., 2017; 2024a). Some models further incorporate air-assisted cleaning to remove lightweight impurities such as vine fragments, leaves, and loose soil, improving the cleanliness of the harvested product and making it more suitable for immediate storage or downstream handling (Bulgakov et al., 2020). Overall, the dominant trade-off is improved efficiency and automation versus higher initial cost, increased machine mass, and greater maintenance complexity associated with more advanced hydraulic and separation/cleaning subsystems (Hu et al., 2015; Zhang, 2015). As shown in Fig. 5, the self-propelled harvester integrates a digging unit, conveying systems, multi-stage separation and cleaning mechanisms, and a collection unit within a self-propelled chassis.

Combine-type harvesters further integrate digging, conveying, separation, cleaning, and often grading within a single platform, aiming to address key challenges associated with soil–tool interaction, ridge variability, and increasing post-harvest handling requirements (Peng et al., 2024b; Liu et al., 2025). By consolidating multiple operations into one pass, these machines can deliver cleaner and more uniform produce, although adoption is often constrained by farm investment capacity and the availability of technical support for operation and maintenance. In many designs, cleaning and grading are achieved through blower- or airflow-based systems that remove residual soil and plant debris, coupled with roller shafts or chain-based classifiers that sort tubers by size to improve marketability and packing efficiency (Xu and Lu, 2024a; Zhang et al., 2024a). As a result, combine-type harvesters are generally best suited to large fields and high-capacity production systems where high harvesting speed, reduced labor demand, and integrated handling are priority objectives. The primary trade-off is that the gains in throughput and product uniformity come at the expense of higher purchase cost, greater structural and operational complexity, and heavier machine weight, which can reduce affordability and practicality for small-scale farms. Fig. 6. illustrates the operational flow of a combine-type sweet potato harvester, highlighting the sequential processes of digging, conveying with soil separation, and subsequent cleaning and grading operations, together with representative examples of combine-type harvesting machines.
Mechanization level reflects how much of the harvesting process is machine-performed versus manual. Manual or manual-assisted harvesting (e.g., middle-buster plows) can reduce damage because workers control handling and sorting, but it is slow and labor-intensive (Da Cunha et al., 2011; Pargi et al., 2024). Fully mechanized systems automate digging, separation, conveying, and collection to reduce labor and shorten harvest time, yet they require skilled operation and careful adjustment to limit damage under variable field conditions. In practice, manual-assisted methods suit small or irregular fields with available labor and low capital, semi-automatic systems mechanize excavation and basic conveying while retaining manual collection/cleaning as a transition option, and fully mechanized harvesting provides the highest throughput for larger farms but is sensitive to soil variability and settings such as digging depth, vibration intensity, and conveying speed.
Digging and soil separation largely determine efficiency and tuber damage because they control soil disturbance, draft requirement, and impact forces during lifting and transfer (Achkevych et al., 2024). Most machines therefore combine a primary digging element with separation devices and depth-control components to maintain stable performance across different ridge and soil conditions. Blade-type tools (V-shaped or flat shares) offer stable undercutting, with V-shaped blades generally lowering resistance by laterally splitting soil flow, while flat blades may require higher draft in cohesive soils (Md Akhir et al., 2014). Rotary mechanisms can improve soil break-up through continuous cutting and lifting but must be tuned to avoid abrasion, whereas vibration-assisted designs reduce soil adhesion and excavation resistance, improving soil shedding and lowering clogging risk (Md Akhir et al., 2014). Separation units (webs, rods, rollers, screens) must balance soil removal and gentle handling, since excessive drop height or aggressive agitation increases bruising and skin damage.
As summarized in Table 2, the major harvester classes differ in power source and operating principle, creating consistent trade-offs among field capacity, cost, and practical suitability; therefore, equipment selection should align with farm scale, labor availability, field conditions, and production objectives.
Table 2.
Classification of sweet potato harvesting methods based on operational characteristics, field capacity, damage risk, and commercialization potential.
Recent technology trends
Recent sweet potato harvester development has focused on improving adaptability to ridge variability and cohesive soils while minimizing tuber damage. Modern platforms increasingly adopt adjustable digging angles, flexible frames, and hydraulic lifting or depth-control mechanisms to maintain stable undercutting depth on uneven terrain (Yang et al., 2024b; Song et al., 2025b). Because sweet potatoes have thin skin, irregular geometry, and are commonly grown in raised ridges, harvesting performance is strongly constrained by soil adhesion, uneven digging depth, and impact loads at transfer points, which can cause bruising and breakage (Baybulatov et al., 2021; Peng et al., 2024a). To reduce draft force and improve soil–tuber separation in clay or high-moisture soils, vibration-assisted digging units and rotary blades have been applied to loosen cohesive soil and enhance soil shedding; however, excessive vibration amplitude or poorly tuned operating parameters can increase abrasion and surface injury, making optimization essential (Zhang, 2015; Liu et al., 2025).
Smart farming technologies can improve sweet potato harvesting by integrating sensors, automation, and real-time decision support (Kim et al., 2024). Computer vision systems mounted near the conveyor or sorting unit can detect tuber damage, bruising, soil adhesion, and harvesting losses during operation (Xu and Lu, 2024b). In addition, soil moisture sensors can support variable-rate harvesting by adjusting digging depth, forward speed, and vibration intensity according to field conditions, thereby reducing tuber damage and improving harvesting efficiency (Adamchuk et al., 2018).
Beyond excavation, conveying and separation systems are major contributors to damage and clogging. Earlier rigid metal conveyors often promoted soil accumulation and higher collision forces, especially at stage-to-stage transfer points (Misener et al., 1989). Recent modifications therefore emphasize rod-, belt-, or soft-material conveyors, anti-clogging designs, and vine-cutting or vine-guiding attachments to stabilize material flow and reduce bruising and losses under high residue and cohesive conditions (Smith and Wright, 1994; Peng et al., 2024b; Jeong et al., 2025). Key design parameters (conveyor angle, conveying speed, separation path length, and drop height between stages) must be balanced, since steeper angles and longer paths improve soil detachment, while excessive drop height increases collision energy and damage risk (Bao et al., 2021). Collectively, these structural improvements enhance soil separation efficiency, reduce draft requirement, and improve tuber protection, thereby providing a more reliable mechanical platform for advanced control and automation (Yang et al., 2024a; Jiang et al., 2025; Liu et al., 2025).
Automation research is increasingly extending sweet potato harvesting from mechanization toward perception-guided operation and post-harvest handling. Current approaches integrate global navigation satellite system (GNSS)/GPS for navigation, machine vision for detection and grading, and force/feedback sensing to support gentle handling and parameter synchronization (e.g., depth control and conveyor speed; Peng et al., 2024b; Xu and Lu, 2024b). AI-based vision has been demonstrated for grading tasks; for example, YOLOv8-based approaches have reported high accuracy for size and surface defect classification in sweet potato grading (Xu and Lu, 2024b). Multi-sensor perception (camera–LiDAR–radar) and sensor fusion methods reported in broader agricultural robotics literature further indicate the potential for robust operation in complex field environments (Song et al., 2025a).
Despite progress, field deployment remains limited by tuber fragility and strong variability in soil texture, ridge geometry, and planting depth, which can degrade sensor reliability and increase the risk of damage if control parameters are not tuned to local conditions (Bao et al., 2021; Shaheb et al., 2021; Peng et al., 2024a; Rahman et al., 2025). High system cost driven by precision sensors, controllers, and maintenance also constrains adoption, particularly for small- and medium-scale farms (Jiang et al., 2025). Overall, the practical benefit of automation depends less on automation level alone and more on how effectively the system maintains consistent digging depth, synchronizes separation and conveying, and adapts to field-specific conditions to protect tuber integrity. Machine learning and YOLO-based object detection methods have potential for tuber detection, vine recognition, soil tuber separation monitoring, damage identification, and harvesting loss assessment in sweet potato harvesting machinery (Xu and Lu, 2024b). In actual harvester applications, cameras or depth sensors could be installed near the digging, lifting, or conveying unit, and detection outputs from models such as YOLOv8 could support automatic depth adjustment, conveyor speed control, missed-tuber detection, and post-harvest sorting (Xu and Lu, 2024a). However, direct integration of YOLOv8 or similar AI models into field-tested sweet potato harvesters remains limited, and most available studies are still restricted to image-based detection or controlled experimental validation (Kim et al., 2025a). Future studies should therefore focus on real-time embedded implementation and field testing under variable soil, illumination, vibration, occlusion, and crop conditions (Kim et al., 2025a).
Commercialization trends
The commercialization of sweet potato harvesters has advanced in parallel with ongoing technological innovation, driven by a growing global need for reliable mechanized harvesting. Although academic and industrial efforts have produced a wide range of prototypes and semi-mechanized systems, broad market penetration particularly at large commercial scales remains comparatively limited. This gap reflects a tension between increasing demand for mechanization and persistent constraints on cost, robustness, and cross-regional applicability. Commercialization momentum is largely shaped by structural changes in agricultural labor and production economics. Labor shortages, aging farming populations, rural-to-urban migration, and rising wage levels have increased the urgency for harvest solutions that reduce manual dependence while improving operational throughput and consistency (Ali et al., 2024; Reza et al., 2025). At the same time, producers and processors increasingly require uniform product handling to protect marketable yield and quality, further reinforcing interest in mechanized harvesting systems.
Despite these drivers, several barriers continue to impede global diffusion. High manufacturing and ownership costs remain a major constraint, especially for small and medium-sized farms. Technical adaptability is also a key limitation: sweet potato harvesting must perform reliably under highly variable soil textures, moisture conditions, ridge geometries, and field residue environments, where machine settings and digging/separation mechanisms often require substantial adjustment. In addition, insufficient standardization in performance evaluation (e.g., damage metrics, loss definitions, field test protocols, and soil-condition reporting) complicates benchmarking across designs and slows the translation of prototypes into scalable commercial products.
Recent development trajectories suggest a gradual shift away from small-scale, locally fabricated machines toward more engineered, automated, and export-oriented platforms (Ali et al., 2024; Reza et al., 2025). This transition is increasingly supported by collaboration among research institutions, manufacturers, and agricultural stakeholders, with emphasis on improving system durability, automation of depth/attitude control, separation efficiency, and post-digging handling to reduce bruising and skin damage.
Mechanization of sweet potato harvesting has become a strategic priority in four major producing and consuming countries namely the United States of America (USA), the Republic of Korea, Japan, and China, where shared demographic and economic pressures reinforce the need for mechanized solutions. However, direct technology transfer from potato harvesting is limited. Compared with potato, sweet potato harvesting imposes distinct engineering challenges due to the crop’s fragile skin, irregular tuber geometry and depth distribution, susceptibility to mechanical injury, vine entanglement, and strong sensitivity of digging and separation performance to soil variability. Accordingly, commercialization success depends not only on improving machine efficiency but also on integrating crop- and soil-specific design approaches, standardized evaluation methods, and cost pathways that enable adoption across diverse production systems.
Commercialization progress varies significantly by region, shaped by differing agricultural structures, labor economics, and technological capabilities. Recent development directions converge toward multi-stage excavation–conveyance–separation architectures that reduce soil carryover and injury, product-friendly handling using soft contact interfaces and controlled drop heights, parameter-optimized conveyance supported by experimental testing and discrete element method (DEM) simulation, and gradual incorporation of hydraulic/electronic control for depth and conveying adjustment. The USA aligns with large-scale integrated systems and commercialization pathways. China combines high-volume manufacturing with mechanism-level optimization and simulation-driven research and development. Japan prioritizes compact, high-precision harvesters tailored to small, fragmented plots and premium quality, and Republic of Korea demonstrates rapid progress through government-supported smart agriculture initiatives and strong research activity on double-conveyor systems, soil-dependent performance, and economic feasibility (Won et al., 2024; 2025; Kim et al., 2025b; Lee et al., 2025).
The USA is commonly positioned at an advanced stage of sweet potato harvester commercialization because its production context favors mechanization: farms are comparatively larger and more uniform, labor costs are high, and producers have a longer history of adopting precision-agriculture technologies. In this setting, the dominant commercialization pathway centers on high-capacity, integrated harvesting platforms that can execute multiple operations such as vine handling/management, digging, lifting, conveyance, cleaning, and collection within a continuous workflow (Peng et al., 2024b; Kim et al., 2025b). Such integration reduces labor dependence during peak harvest periods and increases operational consistency, which is increasingly important for commercial scale production and postharvest quality management.
Current USA oriented systems typically integrate GPS-guided tractor operations, automated or semi-automated digging depth management, and multi-stage conveyor modules designed for industrial throughput (Kim et al., 2025b). In review discussions, manufacturers are often referenced as developing combined harvesters that consolidate major harvesting steps into a single operational pass, thereby improving productivity (Peng et al., 2024b). These systems illustrate how commercialization at scale tends to drive the adoption of robust modular subsystems: stable digging shares, controlled lift conveyance, staged separation/cleaning webs, and product-friendly transfer interfaces as shown in Fig. 7.
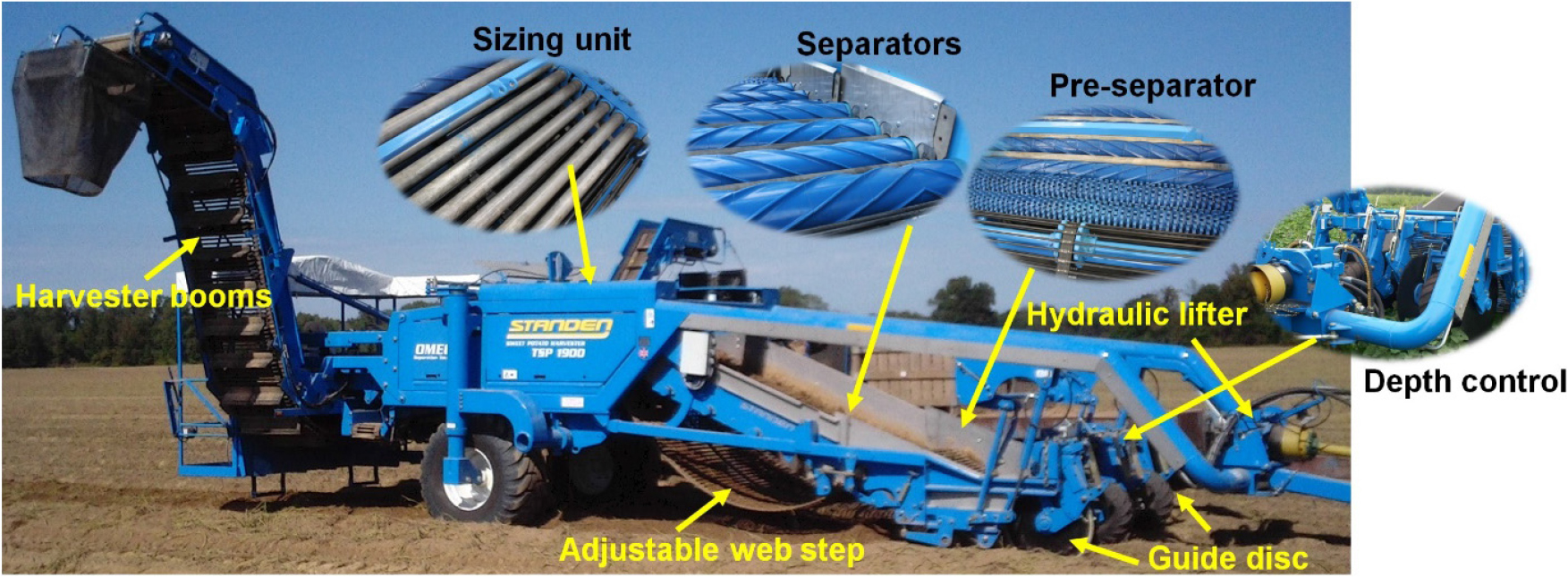
Despite higher mechanization intensity, sweet potato harvesters in the USA context must still address tuber-specific vulnerability. Irregular tuber morphology, skin fragility, and variable depth distribution motivate continued refinement of adjustable digging shares, hydraulic depth control, and rubber-lined or otherwise product-friendly conveyance to reduce bruising and abrasion (Peng et al., 2024a). These technical constraints are not secondary: in sweet potato value chains especially fresh market and storage-intensive systems even modest increments in injury rates can translate into major losses in marketable yield and storability.
An important feature of the USA pathway is the presence of relatively mature commercialization channels linking universities, industry, and growers. Examples include a “know-how” contract for commercial production of a vine disposal machine and field evaluations conducted with commercial grower participation (Smith and Wright, 1994; Akula, 2019). These cases emphasize that commercialization is not solely a matter of machine design: grower-facing validation, manufacturability, serviceability, and credible performance demonstration shape adoption. The USA literature in this area often highlights practical field performance assessment and economic impact framing as part of the technology diffusion process (Smith and Wright, 1994; Akula, 2019).
At the market level, reports have described North America as representing a substantial portion of the global sweet potato harvester market, driven by mechanization intensity and equipment replacement demand (VMReports, 2026). While such figures vary by reporting approach, the broader implication remains stable: the USA environment supports higher-capacity, integrated systems and more structured commercialization pathways than many smallholder-dominant contexts.
China dominates global sweet potato production and has developed extensive commercialization capacity across a wide range of machine classes, from cost-effective tractor-mounted harvesters to semi-automatic and combine-type designs. This dominance reflects both manufacturing scale and sustained research and development attention to the core engineering bottlenecks of sweet potato harvesting especially soil–tuber separation and injury reduction under variable ridge and soil conditions (Peng et al., 2024b; 2025). The commercialization pathway is therefore best characterized as dual-track: (i) scaled-up machines suitable for extensive plains and commercial fields, and (ii) lightweight/modular systems intended for small-to-medium farms and heterogeneous terrain (VMReports, 2026).
Across modern sweet potato harvester designs, conveyor-based separation systems have largely replaced earlier plow-type or simple elevator mechanisms. The core purpose is consistent across implementations: to separate tubers from soil clods, stones, and vine residues while minimizing mechanical damage. In Chinese research and development, this has produced a large body of work on conveyor geometry, web speed, vibration characteristics, transfer interfaces, and staged cleaning structures.
Several Chinese studies emphasize staged separation to reduce cumulative stress on tubers. For instance, a two-segment separation concept combining an elevator chain and a double-buffer clearing platform was experimentally optimized, reporting an operating parameter set (e.g., vibrating shaft frequency and chain/platform speeds) associated with low skin-breaking and impurity rates (Yang et al., 2024b). While the specific parameter values are context- and prototype-dependent, the commercialization implication is general: staged separation can distribute soil removal workload across multiple contact surfaces, lowering peak mechanical loading and reducing damage risk.
A closely related topic is the transfer point between conveyors, where tubers may drop, collide, or experience abrupt kinematic transitions. Optimization of a hand-over lifting mechanism through EDEM simulation and field experiments illustrates how synchronized kinematics at transfer points can reduce loss and injury rates (Shen et al., 2023). This line of work is particularly relevant because transfer events often dominate impact injury mechanisms even when the primary digging and conveying stages are well-designed.
A distinctive feature of Chinese development is extensive use of DEM simulations (e.g., EDEM) to analyze soil–tuber–machine interactions and optimize parameters before committing to costly prototyping cycles as shown in Fig. 8 (Shen et al., 2023; Peng et al., 2025). DEM modeling enables designers to visualize particle-level interactions, identify where tubers experience excessive contact forces or collisions, and explore how changes in web speed, angle, or geometric clearances influence separation and damage. From a commercialization perspective, simulation-driven design can shorten iteration cycles, reduce development cost, and improve the likelihood that prototypes translate into manufactural products.
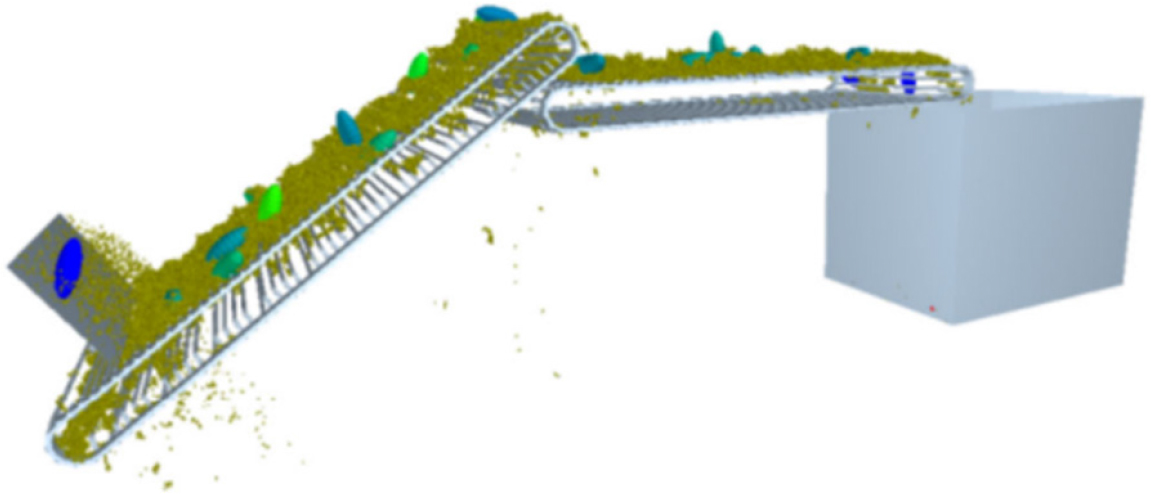
Fig. 8.
EDEM simulation of conveyor/separation mechanism for lightweight combine (Peng et al., 2025).
Injury reduction remains the primary technical barrier to broad adoption because damage directly affects market value and storage quality. Work on chain-lever elevator systems has characterized damage types (e.g., surface injury, tissue extrusion, breaks) and demonstrated that redesign of rod structures and operational parameters can reduce injury ratios (Wang et al., 2014). Complementary efforts on “low-damage conveying mechanisms” further emphasize the integration of agronomic understanding (tuber physical properties and soil characteristics) with mechanical design, aimed at preserving fresh-market quality while maintaining separation efficiency (Wang et al., 2025). Emerging solutions also include flexible conveying devices and biomimetic soft-contact elements to reduce collision severity during transport (Yang et al., 2024b). Fang et al. (2025) reported a crawler self-propelled potato combine harvester integrating an “intelligent” collecting module that includes residual film collection, vibration-based potato–soil separation, auxiliary manual sorting, and automated boxing as shown in Fig. 9. Although the specific intelligence functions are not fully detailed, the design indicates a shift toward more automated collection and handling to reduce labor demand.
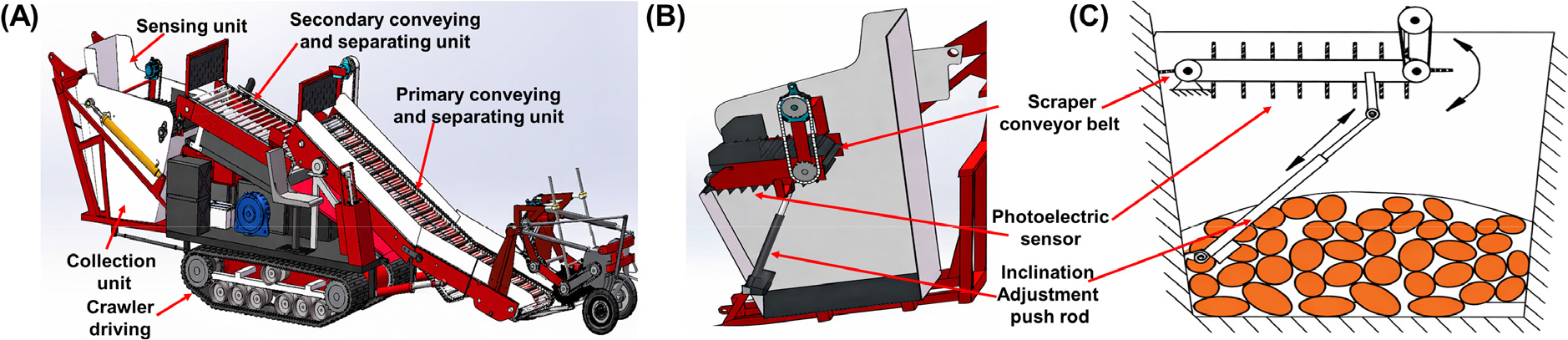
Fig. 9.
Crawler self-propelled potato combine harvester with an integrated sensing and collecting module: (A) 3D structural schematic of self-propelled potato harvester, (B) 3D schematic diagram of the sensing and collecting unit and (C) 2D simplified structural diagram of the sensing and collecting unit (Fang et al., 2025).
Although China leads manufacturing and availability, adoption remains heterogeneous across provinces due to fragmented landholding, diverse topography, and variable soil conditions factors that complicate standardized machine setup and operator training. Financing constraints also influence adoption of higher-end combine-type machines (VMReports, 2026). These realities reinforce the importance of modularity and adaptability: commercialization success depends not only on producing machines at scale, but also on ensuring machines can be tuned to local ridge geometry and soil moisture regimes with manageable operational complexity.
Sweet potato industry in Japan is characterized by small and fragmented plots, complex topography, and a strong emphasis on premium quality, which collectively shape a commercialization pathway distinct from large-scale integrated systems. Mechanization in this environment typically relies on compact one- or two-row harvesters optimized for narrow ridges and hilly conditions, where maneuverability and precise depth control are essential (Peng et al., 2024a). In addition, market requirements that prioritize appearance and quality preservation motivate designs that minimize skin abrasion and bruising during excavation, conveyance, and collection.
Because field and cultivar diversity restrict the applicability of large combined harvesters, Japanese designs often emphasize adjustable digging depth, flexible cutting/blade interfaces, and short-drop or controlled transfer conveyors to reduce impact injury. Review discussions commonly describe this as a shift toward multi-functional yet compact systems with precision-oriented control that preserves tuber quality while improving labor efficiency (Peng et al., 2024a; Kim et al., 2025b). Manufacturers are frequently cited as focusing on lightweight harvesters with gentle handling features, reflecting the commercialization logic that quality preservation is the dominant value driver in premium markets.
Compared with the USA “industrial throughput” emphasis, Japanese commercialization tends to be framed around maintaining export- or premium-grade tuber appearance under operational constraints (small plots, ridge variability, slope). In this sense, Japan demonstrates a pathway where market structure and field geometry jointly select for compact, precise, and product-friendly systems. Adoption growth is therefore tied to the ability of machines to reduce labor while meeting stringent quality thresholds, rather than achieving maximal hectares-per-hour.
Republic of Korea has made rapid progress in sweet potato harvesting mechanization through government-supported smart agriculture initiatives and active research focusing on machine performance under small-field and hilly conditions. Korean cultivation is often constrained by irregular fields and variable slopes, limiting the applicability of large-scale platforms and increasing demand for compact, efficient, and adaptable harvesters (Kim et al., 2025b). In the Korean literature, three themes appear particularly prominent: (1) double-conveyor separation architectures, (2) performance evaluation across soil textures, and (3) economic feasibility and ownership model analysis (Won et al., 2024; 2025; Lee et al., 2025).
Korean research frequently highlights double-conveyor systems designed to achieve low damage rates through sequential separation stages. Conceptually, distributing separation workload across two conveying surfaces can reduce mechanical stress on individual tubers, allow gentler soil removal, and mitigate clogging under heavier soils. Prototype evaluations have reported strong digging performance and emphasize that soil texture significantly influences effectiveness and damage rates, underscoring the need for soil-conditioned operating windows as shown in Fig. 10 (Won et al., 2024; 2025).
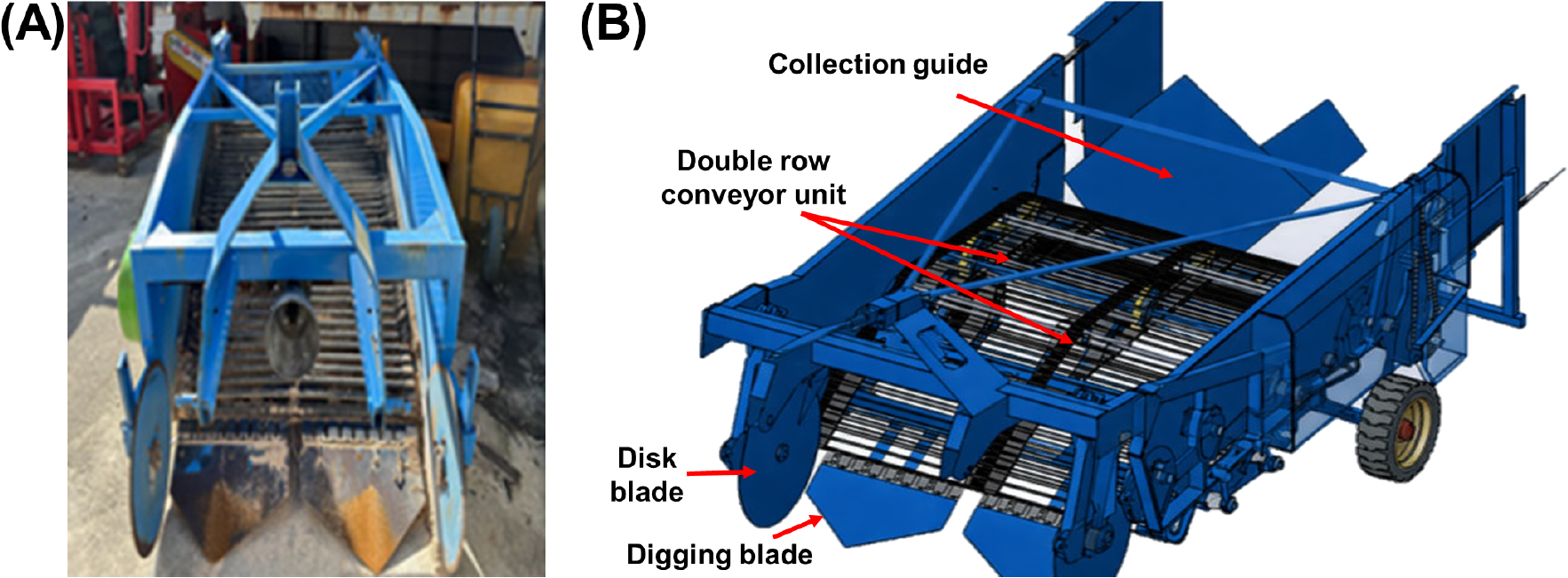
Fig. 10.
Double conveyor-type sweet potato harvester; (A) prototype, and (B) components of the prototype (adopted from Won et al., 2024).
A major contribution of the Korean research stream is its systematic attention to performance variation by soil type. Rather than presenting a single “best” configuration, Korean studies tend to show that damage, loss, and separation quality can shift meaningfully with soil texture and moisture conditions (Won et al., 2025). This is directly relevant to commercialization because it implies that machines must be accompanied by practical setup guidelines (digging depth, web speed, conveyor inclination, PTO/forward speed matching) that help operators maintain a quality throughput balance under local conditions.
Korean studies also emphasize the economic imperative for mechanization driven by high labor costs and workforce shortages, and therefore devote attention to mechanization options, investment feasibility, and adoption pathways (Lee et al., 2025). Because farm sizes can be small and capital constraints real, cooperative ownership and rental systems are often evaluated as mechanisms to improve access and reduce the burden of high equipment costs (Lee et al., 2025). This “economics-first” framing is crucial in the Korean context: commercialization success depends not only on technical performance, but also on developing ownership and service models compatible with small, heterogeneous farming systems.
A landmark comparative study examining sweet potato farming practices and mechanization status between the USA and Republic of Korea provides valuable context for interpreting why commercialization pathways diverge, and how equipment scale and technology transfer strategies may need to differ between regions (Kim et al., 2025b). Such cross-national analyses are particularly useful for identifying transferable modules (e.g., product-friendly conveyance, depth control) while acknowledging that full-system transfer may be limited by field structure and economic constraints. Table 3 summarizes the overall commercialization trends of major sweet potato growing areas.
Table 3.
Regional summary of commercialization trends in sweet potato harvesting machinery.
| Region | Farm structure |
Commercialization level | Key technical features | Major challenges | References |
|
United States of America |
Large, uniform farms (>50 ha) |
Fully mechanized multi-row combines |
GPS guidance, hydraulic depth control, multi-stage conveyors, rubber belts |
High cost, limited smallholder use, tuber bruising | Peng et al. (2024b); Kim et al. (2025b) |
| Japan |
Small, fragmented plots (<2 ha); sloped terrain |
Compact 1 - 2 row harvesters with vine-cut and dig systems |
Lightweight frame, precision hydraulics, short-drop conveyors |
Small fields, cultivar variability, high production cost | FreshPlaza (2023); VSS Machinebouw (2024); Peng et al. (2024a) |
| China |
Large acreage; variable soil and terrain |
Rapidly developing light and modular combines |
EDEM-optimized conveying, adjustable rake, modular low-power design |
Terrain variability, tuber damage, operator skill gap | Shen et al. (2023); Peng et al. (2024a; 2025) |
|
Republic of Korea |
Small, irregular plots (<1 ha); aging workforce |
Expanding tractor-mounted double-conveyor systems |
Dual rubber belts, compact frame, auto-steer ridge-tracking |
High cost, fragmented fields, need for rental/ service models | Kim et al. (2025b); Lee et al. (2025) |
Across the USA, China, Japan, and the Republic of Korea, sweet potato harvester development is converging toward a shared engineering objective: achieving high separation efficiency while maintaining tuber integrity under highly variable soil and ridge conditions. This convergence is reflected in the widespread transition from earlier plow-type diggers and simple elevator systems toward multi-stage excavation conveyance–separation architectures. Modern harvesters increasingly integrate soil loosening, lift conveyance, staged sieving/cleaning, and controlled transfer points to reduce soil carryover and stabilize throughput while limiting repeated impacts. Although the machine scale differs by region high-capacity integrated systems in the USA (Kim et al., 2025b), broad tractor-mounted and combine-type families in China (Peng et al., 2024b), compact precision harvesters in Japan (Peng et al., 2024b), and double-conveyor prototypes in Republic of Korea (Won et al., 2024; 2025) the underlying design logic is similar: distribute separation loads across multiple interfaces, minimize abrupt kinematic transitions, and maintain stable digging depth and conveyor motion to improve both productivity and quality consistency.
Tuber damage reduction remains the most decisive technical constraint shaping commercialization outcomes. Unlike potato harvesting, sweet potato harvesting must account for fragile skin, irregular morphology, and a high sensitivity of market value and storability to surface abrasion and bruising. The literature consistently links damage to three dominant mechanisms—shear at blade contact, impact during drops or collisions, and cumulative friction during conveyance and separation and therefore design solutions increasingly focus on controlling contact severity throughout the harvesting pathway (Wang et al., 2014). Product-friendly conveying strategies, including rubber-lined contact surfaces, short-drop transitions, soft transfer points, and moderated web speeds, have become central to both prototype research and commercial design evolution (Peng et al., 2024b; Wang et al., 2025). Component-level redesign and parameter optimization, such as chain-lever elevator improvements that reduce injury ratios (Wang et al., 2014), reinforce the broader conclusion that commercialization success is not primarily determined by throughput alone; rather, sustained adoption requires injury mitigation that is robust across field variability and does not impose overly narrow operating windows.
Simulation-driven development has emerged as a practical enabler of commercialization by accelerating mechanism optimization and reducing prototyping costs. In particular, Chinese research frequently applies DEM modeling often using EDEM to quantify soil–tuber–machine interactions, visualize collision and contact force distributions, and screen geometric and operational parameter sets before field trials (Peng et al., 2025). This approach is increasingly used to refine conveyor separation behavior and identify failure modes that lead to bruising, clogging, or excessive soil carryover. Studies optimizing transfer subsystems, such as hand-over lifting mechanisms between conveyors, further demonstrate that transfer-point kinematics can dominate injury and loss outcomes, and that coupling simulation with field validation provides a structured pathway for improving commercial readiness (Shen et al., 2023). More broadly, simulation-supported design is contributing to a shift from single-prototype development toward families of machines and parameter “recipes” adapted to specific ridge widths, soil textures, and farm scales, which is essential for market expansion beyond narrow regional niches.
Despite advances in mechanical design, the level of automation and intelligent control in sweet potato harvesters remains limited relative to other agricultural machinery domains, and this gap has direct commercialization consequences. Most systems still rely on operator experience for tuning forward speed, digging depth, conveyor speed, and inclination, meaning performance and tuber quality can vary significantly between fields and operators. Early efforts toward automated depth control implemented via hydraulic actuation and sensing indicate a clear direction for increasing robustness, because consistent digging depth is critical for reducing loss while avoiding unnecessary soil intake that burdens downstream separation and elevates collision risk (Li et al., 2018). However, the literature suggests that automation will yield the greatest commercialization impact when it is explicitly linked to quality preservation and stability under ridge variability (rather than convenience alone), particularly through sensor-assisted control of depth, pitch/roll, and adaptive conveyor parameter adjustment in response to soil and residue conditions.
Commercialization outcomes ultimately depend on the alignment of machine design with regional farm structure and adoption economics. High-capacity integrated systems are most viable in large, uniform production contexts, while compact, precision-oriented machines are more appropriate for fragmented plots and topographically complex areas (Peng et al., 2024b; Kim et al., 2025b). In small-field settings, cost barriers remain substantial, amplifying the relevance of cooperative ownership and rental/service models, which are increasingly analyzed in Republic of Korea as part of mechanization feasibility (Lee et al., 2025). At the same time, the cross-national evidence indicates that technology transfer is most effective at the module level such as product-friendly conveying concepts, transfer-point designs, depth-control strategies, and simulation-based optimization methods rather than through wholesale adoption of full-system configurations developed for fundamentally different field geometries and economic conditions (Kim et al., 2025a). Accordingly, future commercialization progress will likely depend on standardized evaluation metrics and reporting, robust operating-window design across soil and ridge variability, and a more explicit integration of sensing and control that measurably reduces injury and loss in real field conditions (Peng et al., 2025; Won et al., 2025).
Major technologies reviewed in this study differ considerably in technology readiness. Manual assisted harvesting and tractor attached diggers are already market ready technologies, corresponding approximately to technology readiness level (TRL) 8 - 9, because they are widely used in practical farming operations (Bekele et al., 2025). Trailed, self-propelled, and combine type harvesters generally correspond to TRL 7 - 9 depending on region and machine configuration, although their adoption is rely by cost, field adaptability, and maintenance requirements (Li et al., 2024; Song et al., 2025b). In contrast, sensor-based monitoring, machine vision, YOLO-based detection, AI-based control, and robotic harvesting remain mostly at the experimental or prototype stage, approximately TRL 2 - 6 (Yu et al., 2020). The major gap between laboratory prototypes and commercial machines is caused by limited field validation, variable soil and ridge conditions, tuber damage risk, high manufacturing cost, and insufficient farmer centered design (Zhang et al., 2024a). Therefore, future development should focus on field-tested, economically feasible, and locally adaptable technologies that can reduce manual labor dependence while improving harvesting efficiency and product quality.
The technology readiness levels and commercialization status of major sweet potato harvesting technologies were qualitatively estimated based on the development stage reported in the reviewed literature, including prototype development, field validation, commercial availability, and practical adoption (Mankins, 1995; GAO, 2020). The summarized classification is presented in Table 4.
Table 4.
Technology readiness levels and commercialization status of major sweet potato harvesting technologies.
Patent activity is also an important indicator of commercialization trends in sweet potato and root crop harvesting machinery. In leading Asian countries such as China, Japan, and Republic of Korea, recent patent filings have mainly focused on digging blades, vibration-based soil separation, conveyor mechanisms, damage reduction, compact harvester structures, and automation assisted harvesting (Peng et al., 2024a). China shows strong patent activity in root and tuber crop harvesters due to large production scale and increasing labor shortages, while Japan and Republic of Korea have emphasized compact, high precision, and field adaptable machinery suitable for smaller farm structures (Kwon, 2021). These patent trends indicate that current R&D investment is moving toward labor saving, damage reducing, and commercially adaptable harvesting technologies (Shen et al., 2023).
Future perspectives and research needs
The advancement of sweet potato harvesting mechanization requires a comprehensive and forward-looking approach that integrates engineering innovation, smart technologies, and supportive policy frameworks. Future priorities should emphasize both technical refinement and systemic adaptation to ensure efficient, sustainable, and inclusive mechanization across diverse production environments. Emerging research offers multiple pathways for innovation in harvester design and operation. One critical area is damage minimization through product-friendly harvesting pathways. Literature consistently identifies injury control as the primary commercialization bottleneck, motivating continued refinement of digging, conveying, and separation mechanisms to reduce shock, shear, and friction. Design directions include shock-absorbing and soft-contact conveying interfaces, controlled transfer points, and adaptive vibration/cleaning strategies that maintain separation efficiency without increasing collision severity. In this context, the design targets emphasized by Peng et al. (2024a) for low skin breakage, low injury, effective soil separation, and smooth transport remain appropriate as performance benchmarks for future mechanism development. Complementing physical redesign, virtual prototyping, and computational optimization should become routine in development cycles. Demonstration for the utility of EDEM-based simulation coupled with experiments for optimizing subsystem parameters, suggesting a scalable pathway for reducing development cost and accelerating iteration (Shen et al., 2023).
Development of adaptive and intelligent operation using smart technologies also presents considerable potential. Current commercial machines still rely heavily on operator judgment for forward speed, digging depth, conveyor speed, and vibration intensity, which leads to unstable performance when soil moisture, clod size, or ridge shape changes within or across fields. Future harvesters should incorporate sensing and feedback control to enable real-time parameter adjustment based on soil and tuber flow conditions, thereby improving robustness and reducing energy waste. The need for structural and parameter optimization to reduce energy costs also supports integrating intelligent adjustment and optimization routines into machine operation (Mu et al., 2022). In parallel, damage detection and in-field quality assessment represent an underdeveloped but high-impact research frontier. Integrating optical/imaging sensors, GPS-real-time kinematic (RTK)-guided steering, internet of things (IoT)-enabled monitoring, and machine learning could enable early detection of irregularities and allow immediate control adjustments (e.g., lowering conveyor speed or modifying vibration intensity) to prevent cascading losses.
The harvester configurations suitable for diverse farm structures, particularly small and fragmented holdings and sloped terrain, are another priority. Commercialization in Asia is often constrained by limited maneuvering space, narrow ridges, and irregular field boundaries, requiring compact and modular designs. Reconfigurable modules for digging, separation, cleaning, and collection could expand adaptability while reducing ownership costs via partial upgrades or shared module use. For hilly and mountainous production contexts, research should emphasize lightweight, maneuverable equipment with improved stability, safety, and ergonomics. Recent efforts targeting hilly operations highlight both feasibility and the need for systematic design principles specific to slope conditions (Yao et al., 2023; Wang, 2025). In addition, smallholder-appropriate technologies including simplified maintenance, locally manufactured components, and participatory design, are essential to broaden adoption. Social acceptability and farmer-centered evaluation have been explicitly identified as important considerations for viable dissemination pathways (Flores and Dela Cruz, 2017).
Despite these advancements, current harvester designs are limited to soil-specific optimization and broader operating-window robustness. Most machines lack adaptability to variable soil textures and ridge geometries, limiting their universal applicability. Performance variation by soil texture and related properties (e.g., cohesion, clod formation) remains a persistent limitation; therefore, future research should either develop soil-adaptive systems or clearly define soil-conditioned operating windows and configuration guidelines. The strong dependence of performance on soil texture reported by Won et al. (2025) reinforces the need for standardized multi-soil test protocols and design strategies that either optimize for dominant soil classes or incorporate adaptive control and adjustable separation dynamics. This is particularly important for commercialization because a machine that performs well only under narrow conditions has limited market scalability. Sustainability also should be treated as a core design objective rather than an additional benefit. Energy efficiency and alternative power systems including hybrid or electric drivetrains can reduce operating costs and emissions, especially when paired with intelligent control that prevents excessive soil intake and inefficient separation dynamics. Prior evidence that equipment design can substantially influence power requirements supports positioning energy efficiency as an explicit performance metric in future harvester development (Song et al., 2010). Alongside energy, lifecycle-oriented assessment is needed to quantify environmental impacts across manufacturing, operation, maintenance, and end-of-life phases, enabling objective comparison among machine classes and powertrain choices.
Finally, the effectiveness of future innovations will be limited unless supported by stronger evidence-based economic assessment and institutional implementation. There remains a shortage of long-term field performance datasets and rigorous return on investment (ROI) analyses that account for quality losses, labor displacement, service costs, and variability in field conditions. Future studies should therefore integrate comparative economic evaluation and value-chain–aware assessment approaches, extending the analytical perspective used in mechanization and value-chain studies to compare alternative mechanization options across contexts (Flores and Dela Cruz, 2017). In addition, pilot testing and participatory evaluation should be expanded to jointly assess technical feasibility, financial viability, and social acceptability under real farming conditions (Flores and Dela Cruz, 2017). The iterative nature of harvester innovation emphasized in recent work where conclusions are framed as references for further optimization and prototype refinement suggests that sustained, multi-cycle validation remains necessary before technologies achieve stable commercialization (Shen et al., 2023; Yao et al., 2023).
Conclusion
This review indicates a clear global shift in sweet potato harvesting from labor-intensive operations toward mechanized systems that increasingly incorporate precision design, sensor assistance, and data-supported optimization; however, commercialization remains uneven across regions, farm scales, and field conditions. Substantial engineering progress has been achieved in low-damage excavation, conveying, and separation, supported by mechanism-level redesign (e.g., improved rake and transfer geometries), staged separation concepts, and product-friendly handling elements such as vibration-controlled and rubber-lined conveying surfaces. In parallel, simulation-based development particularly DEM approaches using EDEM has accelerated parameter screening and subsystem optimization, strengthening the design-to-prototype pathway and contributing to measurable reductions in tuber injury and improvements in operational performance in compact tractor-mounted and self-propelled platforms.
Regional commercialization pathways reflect distinct alignments between machine configuration and production structure. The USA is characterized by higher-capacity, integrated systems suited to large and relatively uniform fields, with GPS-guided and hydraulically controlled harvesting operations supporting consistent throughput and commercial-scale adoption. Japan and the Republic of Korea prioritize compact, high-precision machines designed for fragmented plots and complex terrain, where gentle handling and maneuverability are critical and performance depends strongly on ridge geometry and soil conditions. China advances along a dual trajectory, combining industrial combine-type platforms for extensive plains with lightweight, modular units for heterogeneous topography and small-to-medium farms. Across these contexts, adoption is consistently driven by rising labor costs, workforce shortages, quality and storability requirements, and mechanization-support programs, yet remains constrained by high capital costs, maintenance and service burdens, operator skill requirements, and limited robustness under soil–ridge variability. There are some limitations, as it mainly relies on published studies, patents, and publicly available commercial information; therefore, some unpublished prototypes, region-specific developments, or company-level technical data may not have been fully included. Furthermore, variations in soil type, crop variety, ridge geometry, moisture condition, and performance evaluation methods across previous studies limit direct comparison among sweet potato harvesting machines. Future research should focus on standardized field testing, damage and loss reduction, optimization of digging and soil–tuber separation mechanisms, and techno-economic evaluation to strengthen the commercialization potential of sweet potato harvesting machinery.
Future progress toward sustainable and scalable mechanization will require system-level integration rather than isolated improvements in individual components. Technical priorities include further development of low-damage mechanical pathways, transfer-point injury mitigation, and soil-adaptive operation enabled by real-time sensing and control. Equally important are cost-reduction and manufacturability strategies, modular configurations that match diverse farm structures, and standardization of performance metrics and ridge/cultivar practices to improve machine compatibility and comparability. Finally, commercialization will depend on enabling institutions and policies such as targeted subsidies, affordable credit, cooperative/rental models, and rural service networks for training, maintenance, and parts implemented alongside rigorous field validation and ROI-based economic assessment. Overall, sweet potato harvesting mechanization has demonstrated technical feasibility; achieving long-term, large-scale sustainability will depend on strengthening the linkage between gentle mechanics, adaptive intelligence, and viable adoption models to deliver resilient and inclusive harvesting solutions worldwide.
