

Introduction
Materials and Methods
전기트랙터 동력전달시스템
시뮬레이션 모델 개발
파워트레인 내구성 평가
파워트레인 내구성 시험
Results and Discussion
동력전달시스템
기어 해석 결과
베어링 해석 결과
감속기 내구시험 결과
감속기 내구성 개선
Conclusion
Introduction
최근 기후변화로 인해 환경 문제에 경각심이 높아짐에 따라, 전 세계적으로 내연기관에 대한 환경 규제를 강화하고 있다(Kim et al., 2023). 유럽에서는 농기계, 건설기계 등 비도로 차량 엔진에 적용되는 EU STAGE-V 규제를 시행하고 있으며, 미국에서는 Tier-4 Final 규제를 시행하여 디젤 엔진에 대한 배기가스 규제를 시행하고 있다(Choi et al., 2023). 농업기계는 건설기계, 선박 등과 비도로이동오염원으로 분류되며, 미세먼지, 질소산화물, 탄화수소 등 주요 대기오염 물질을 배출한다. 비도로이동오염원이 전체 오염물질 배출원에서 차지하는 비중이 점차 증가하고 있으며, 이로 인해 농업기계를 포함한 비도로이동오염원 부문에서의 배기가스 배출 저감 필요성이 더욱 부각되고 있다(Hagan et al., 2023). 이에 따라, 농업 분야에서도 친환경 동력원을 적용하는 것이 중요한 과제로 부상하고 있다.
트랙터는 농작업 기계화의 핵심 장비로써 다양한 종류의 농작업에 대응하는 부속 작업기를 원활하게 활용할 수 있도록 동력을 제공해주는 필수적 역할을 한다(Cho et al., 2022). 농업용 트랙터는 농업기계 중 보유대수 및 공급대수가 꾸준히 증가하고 있어(KAMICO and KSAM, 2024), 농업용 트랙터의 전동화 시 농업분야에서의 배기가스 감소에 큰 기여가 가능할 것으로 생각된다.
전기트랙터에 적용되는 전기구동 시스템은 무공해 운전을 가능하게 하며, 이탄화산소(CO2) 및 질소산화물(NOx) 등의 유해 배출가스를 줄일 수 있어 친환경 농업에 기여할 수 있다. 선진국에서는 전기트랙터 개발 및 상용화를 위한 연구가 활발히 진행 중이며, 국내에서도 관련 연구와 기술 개발, 실증이 점차 확대되고 있다.
Baek 등(2022)은 농작업 부하데이터를 활용하여 E-driving 시스템을 검증하였다. 기존 내연기관 트랙터를 이용하여 농작업별 부하데이터를 수집하였으며, 수집한 부하데이터를 부하율 기반으로 변환하였다. 이후 전기구동 트랙터의 단수에 따른 농작업 가능 여부를 판단하여 E-driving 시스템의 설계를 검증하였다. Kim 등(2024a)은 듀얼 모터와 단일 유성기어 기반 40 kW급 전기트랙터 시뮬레이션 모델 개발하였다. 유성기어 기어비와 감속 기어비를 선정하여 단일 유성기어 기반 동력전달 시스템을 설계하였으며, 작업 모드에 따라 클러치 및 브레이크가 작동하여 유성기어를 통해 동력이 적절하게 전달되는 것을 확인하였다. Baek 등(2024b)은 시뮬레이션을 기반으로 다양한 조건에서 E-axle 시스템 및 트랙터의 성능 예측 연구를 수행하였다. MATLAB/Simulink 환경에서 E-axle 시스템이 적용된 전기 트랙터 시뮬레이션 모델을 개발하여 E-axle 시스템에 대한 시뮬레이션 해석 결과를 분석하였다. Kim 등(2024b)은 농업용 트랙터의 전동화 시, 변화되는 무게중심을 계산하고 설계 변경된 요인들을 적용하여 다양한 농작업기 부착여부와 농업 주행로 환경에 따른 수치해석에 관한 연구를 수행하였다. Park 등(2025)은 전기트랙터의 핵심 부품인 모터와 배터리 성능평가에 대한 연구를 수행하였다. 모터와 배터리 부하데이터를 시뮬레이션 모델을 활용하여 기존 내연기관 트랙터와 비교 분석을 수행하였다.
일반적으로 엔진의 성능곡선은 엔진 회전속도와 토크에 의해 결정되며, 특히 트랙터는 저속에서 토크가 낮고 중속 영역에서 최대치에 도달하며, 고속에서 다시 감속한다(İşler, 2023). 따라서, 엔진 출력은 토크과 회전속도의 곱으로 계산되므로, 최대 출력을 얻기 위해서는 최대 출력이 발생하는 특정 회전속도 범위에서 엔진을 작동시키는 것이 중요하며, 이를 위해 복잡한 다단 변속기가 필요하다. 전기 모터는 저속에서부터 최대 토크를 낼 수 있으며, 상대적으로 넓은 회전속도 범위에서 안정적인 출력을 낼 수 있기 때문에 변속기를 상대적으로 단순화할 수 있다(Han et al., 2021).
따라서, 트랙터의 전동화 시, 이러한 내연기관과 전기 모터의 출력 특성 차이를 반영하여 변속기를 설계 및 개발하고 내구 시험을 수행하여 기어, 베어링 등 구성 요소의 안전율을 확보하는 것이 필요하다. Baek 등(2024a)은 전기 트랙터 듀얼 모터 파워트레인 구조에 대해 내구 해석을 수행하였다. 전기 트랙터 파워트레인의 주요 부품인 기어 및 베어링을 대상으로 내구 해석을 수행하였으며, 기어쌍의 접촉 및 굽힘 강도와 베어링의 수명을 해석하여 내구성 검증을 수행하였다. Yang 등(2024)은 18 kW급 단일 모터 소형 전기트랙터 개발을 위한 데이터 수집에 관한 연구를 수행하였다. 성능 측정은 전기 트랙터 및 정유압식무단변속기와 기계식변속기를 탑재한 내연기관 트랙터를 이용하였으며, 계측 데이터를 활용하여 내연기관 트랙터와의 비교 및 분석을 수행함으로써 성능을 검증하였다. 동시에 차축 및 동력취출장치(power take-off, PTO) 동력전달 효율을 비교하였으며, 대부분의 수치가 내연기관 트랙터보다 높은 것으로 확인하였다. 대부분의 선행 연구는 전기트랙터 개발을 위하여 모터와 변속기를 설계하였고 농작업 가능성을 분석하였으나, 아직까지 변속기의 내구수명 등에 대한 측정 및 분석에 대한 연구는 부족한 실정이다.
본 연구는 20 kW급 전기트랙터 개발을 위한 기초 연구로써, 단일모터 구동 전기트랙터의 동력전달시스템을 설계하였으며 상용 소프트웨어를 이용하여 전기트랙터의 동력전달시스템 시뮬레이션 모델을 개발하였다. 이후, 내구시험 시뮬레이션을 수행하여 기어의 안전율과 베어링의 손상률 및 안전율을 확인하였으며, 다이나모 시스템을 이용하여 동력전달시스템의 내구시험을 수행하여 전기 트랙터의 동력전달시스템의 내구성을 분석하였다.
Materials and Methods
전기트랙터 동력전달시스템
본 연구에서는 Table 1과 같은 단일 모터 구동 방식의 전기 트랙터를 개발하기 위하여 동력전달 시스템을 개발하였다. 전기트랙터는 싱글 모터 타입이며, 모터 출력은 부변속 2단 및 PTO로 분기된다. 기존 내연기관의 엔진 및 주변속은 모터로 대체하였으며, PTO 회전수와 주행 속도가 서로 연동되어 독립적인 제어가 불가능해 PTO를 사용하는 로타리 작업의 주행속도 4 km·h-1와 PTO 회전수 540 rpm을 기준으로 기어비를 조정하였다.
Table 1.
Specifications of the single driving motor type electric tractor.
동력전달시스템은 Fig. 1과 같이 구성하였으며, 크게 모터, 변속기, 차축, 휠로 구성되어 있다. 전기 트랙터의 주행 속도는 각각의 단수에서 최대 12.6 km·h-1 (1단), 21.1 km·h-1 (2단)이다.

시뮬레이션 모델 개발
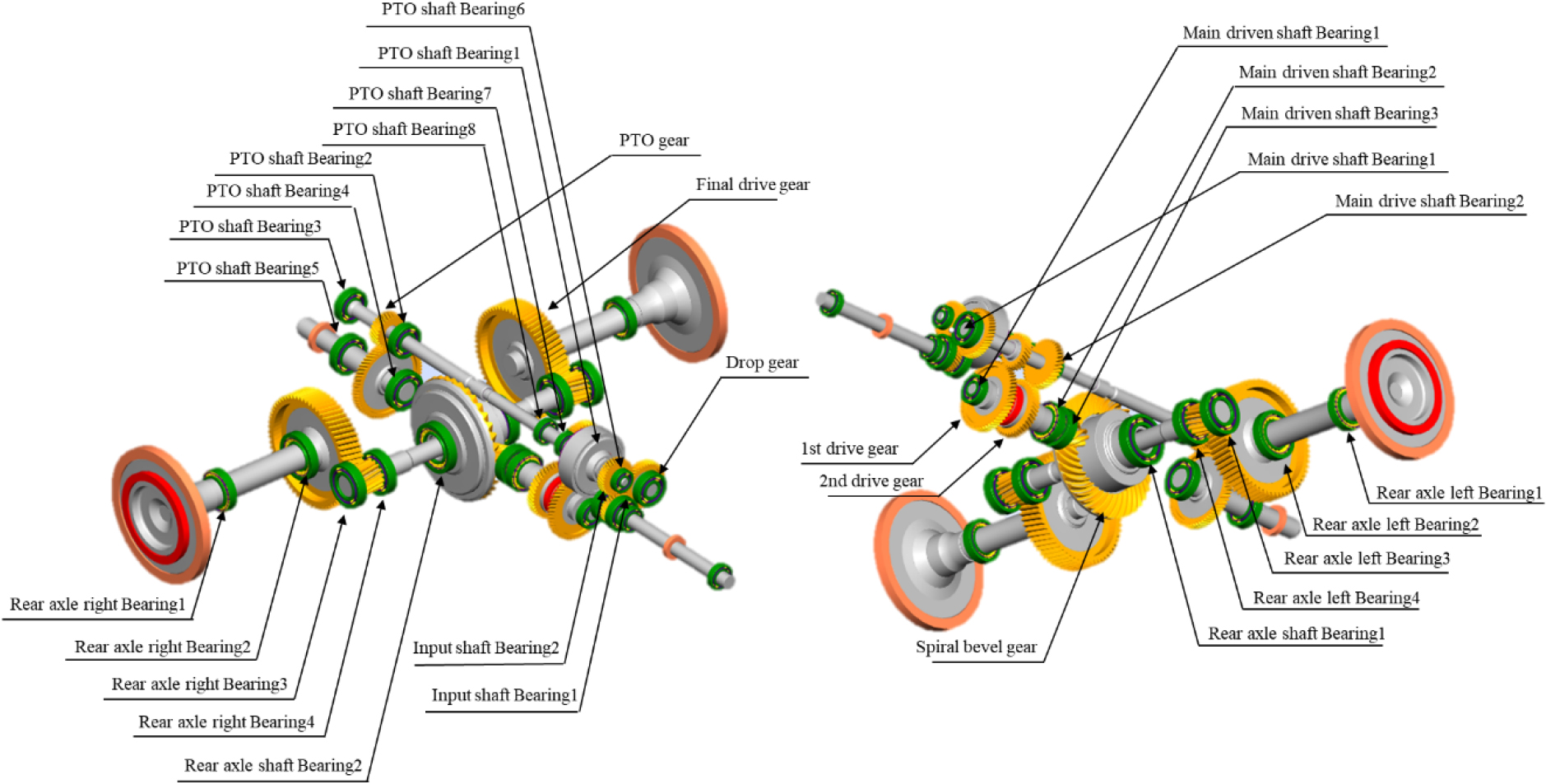
전기 트랙터 동력전달시스템 모델은 Fig. 2와 같이 기어 설계 및 해석 소프트웨어인 MASTA (SMT, 2024)를 사용하여 개발하였다. 입력 부하데이터는 농작업 시 차축과 PTO에 발생하는 토크값으로 선정하여 시뮬레이션 모델에 입력하였다.
시뮬레이션 모델의 입력 부하 데이터는 토크와 회전속도로 선정하였으며, 대표 농작업은 로타리 경운 작업, 쟁기 경운 작업, 로더 작업, 운반 작업으로 선정하였다. Table 2와 같이 작업별 사용 비율을 이용하여 요구 수명을 계산하였다. 요구 수명은 각 작업별 연간 작업시간인 125시간(KOSIS, 2024)을 농식품부에서 제시하는 농기계 내구연수인 8년을 사용하는 것으로 총 1,000시간으로 산정하였으며, 농작업 사용 비율을 반영하여 각 작업별 입력 조건을 선정하였다. 내구 해석은 동력전달시스템 구성 요소인 기어, 베어링을 대상으로 수행하였다.
시뮬레이션 모델 입력 조건은 모터 입력 회전속도, 시간, 휠 토크, PTO 토크이다. 모터 입력 회전속도는 작업 조건에 따라 구분하였다. 로타리 경운 작업은 PTO 회전속도인 540 rpm을 기준으로 기어비를 역으로 계산하여 1,700 rpm으로 설정하였으며, 쟁기 경운 작업, 로더 작업, 운반 작업의 경우 실제 주행속도는 다르나, 본 연구에서는 시뮬레이션의 단순화를 위해 입력 속도를 동일하게 모터 정격 회전속도인 3,000 rpm으로 설정하였다. 모터 정격 회전속도는 전기 트랙터의 성능 검증 및 내구시험 시 기준이 되는 조건으로, 안정적인 출력 특성 확보와 시험 조건의 일관성을 유지하기 위해 선정하였다. 작업 간 차이는 부하율 및 사용 시간 비율을 통해 반영하였다. 시뮬레이션 시간은 총 1,000시간으로 선정하였으며, 농작업 비율은 실제 운용 조건을 반영하여 로타리 경운 작업 45%, 쟁기 경운 작업 5%, 로더 작업 25%, 트레일러 작업 25%로 설정하였다. 로타리 경운은 파종 전 토양 정지 및 잡초 관리 등 연간 수행 빈도가 가장 높은 작업으로 가장 큰 비중을 차지하며, 쟁기 경운은 연 1 - 2회 단기간에 집중되는 고부하 작업이지만 전체 작업 시간 비중은 낮다. 또한 로더와 트레일러 작업은 운반 등와 같이 연중 수행되는 작업이므로 중간 수준의 비중을 반영하였다. 휠 토크는 트랙터의 슬립 토크를 기준으로 산출하였다. 슬립 토크는 타이어와 지면 간 마찰력이 최대가 되어 바퀴가 미끄러지기 시작할 때 발생하는 최대 견인 토크이며, 본 연구에서는 이를 설계 기준 토크로 설정하였다. 따라서, 휠 토크는 차량의 슬립 토크인 5,510.9 Nm에 각 작업 부하율을 곱하여 산출하였다. 작업별 부하율은 동급 내연기관 트랙터의 실차 시험에서 계측된 차축 토크 데이터를 기반으로 산정하였으며, 이를 슬립 토크 대비 평균 부하 수준으로 환산하여 로타리 경운 작업 35%, 쟁기 경운 작업 80%, 로더 작업 65%, 트레일러 작업 50%를 적용하였다. PTO 토크는 동급의 엔진 트랙터 작업에서 계측된 PTO 출력 데이터를 기반으로 계산하였다(Kim, 2025). PTO 출력과 기어비, 효율을 적용하여 PTO 출력축 토크를 248 Nm로 도출하였으며, 입력 PTO토크는 PTO 기어비 3.149, 입력축 회전수 1,700 rpm, 구동부 효율 90%를 이용하여 87 Nm로 계산되었다. 이후, 입력 조건에 안전율 1.8을 곱하여 159.46 Nm로 설정하였다.
Table 2.
Input parameter of the transmission simulation model.
파워트레인 내구성 평가
전기트랙터 파워트레인은 모터, 변속기, 차축, 휠로 구성된다. 전기트랙터 파워트레인의 내구성 평가는 ISO 6336과 ISO 281 규격을 이용하여 기어 안전율 및 베어링의 손상률과 안전율을 계산하였다. 파손은 기어보다 베어링에서 먼저 발생하기 때문에 ISO 6336은 기어의 강도 계산 방법을 제공하며, 이를 통해 기어의 신뢰성과 내구성을 분석할 수 있다(Lee et al., 2024). 내구성 평가는 포장시험 조건을 반영한 가속 수명 시험을 수행하였으며, 부품의 고장이나 피로 손상을 단시간 내에 유도하여 부품의 수명을 예측하는 시험 방식으로, 시험시간을 단축하면서도 실사용 조건을 모사할 수 있는 장점이 있다.
부하-수명 관계는 가속 부하 함수를 모형화한 역승 모형(inverse power model)을 기반으로 한다. 역승 모형은 구성품에 작용하는 하중이 증가할수록 수명이 기하급수적으로 감소하는 특성을 반영하는 수명 예측 모델로, 기계요소의 피로 수명 예측에 널리 활용된다. 해당 모델을 통해 다양한 부하 조건에서의 부품 수명을 예측할 수 있으며, 내구성 확보를 위한 설계 기준 수립에도 유용하다.
기어의 굽힘 안전율 수식은 식(1)과 같으며, 기어 접촉 안전율 수식은 식(2)와 같다.
where, : safety factor for bending stress
: tooth root stress limit (N·mm-2)
: tooth root stress (N·mm-2)
where, : safety factor for contact stress
: pitting stress limit (N·mm-2)
: tooth contact stress (N·mm-2)
베어링의 손상률은 식(3)을 이용하여 계산하였다.
where, : bearing damage rate (%)
: accumulative operating time (h)
: modified reference life (h)
파워트레인 내구성 시험
무고장 정상 시험시간 계산
일반적인 농작업 환경 조건하에서의 무고장 정상 시험시간은 식(4)를 이용하여 계산된다.
where, : zero-failure test time (h)
: warranty target life (h)
: confidence level (%)
: failure rate
: number of samples
𝛽 : shape parameter
본 연구에서 보증목표수명 는 1,000시간으로 설정하였다. 신뢰수준 은 주로 60 - 90% 수준으로 설정하나, 본 연구에서는 단일 시료인 점을 고려하여 60%로 설정하였다. 불신뢰도 는 고장 가능성을 허용하는 수명 기준으로, 높은 신뢰도를 요구하는 장비가 아니므로 20%로 설정하였다(Wilson and Farrow, 2021). 시료 수 은 1개이며 형상 모수 𝛽는 Weibull 분포에서 장비의 고장 패턴을 반영하는 지수로, 일반 기계 부품의 피로는 1.2 - 2.0의 범위가 주로 사용된다(Bertsche, 2008). 따라서, 형상 모수 𝛽는 1.6을 적용하였다.
Table 3.
Parameters of the zero-failure test calculation.
| Item | Value |
| Warranty target life (h) | 1,000 |
| Confidence level (%) | 60 |
| Failure rate | 0.2 |
| Number of samples | 1 |
| Shape parameter | 1.6 |
| Zero-failure test time (h) | 2,418 |
따라서, 무고장 정상 시험시간은 Table 3을 이용하여 2,418시간으로 산출되었다. 그러나, 2,418시간을 시험하기에는 시간이 너무 오래 소요되기 때문에, 부하 수준을 높이고 시험 시간을 줄여 실제 사용조건과 유사한 부하를 구현할 수 있는 가속수명시험 방법을 이용하여 시험을 설계하였다.
가속수명시험
가속수명시험을 위한 역승모형(inverse power model)은 토크, 압력, 하중 등과 같이 비열적(non-thermal) 가속인자를 사용하며, 제품 수명을 가속 스트레스 함수로 사용되는 가속모형으로 식(5)와 같이 계산된다.
where, : life
: stress level
: fundamental constant
𝜆 : fatigue life coefficient
따라서, 가속모델 함수에 따라 가속계수는 식(6)과 같이 계산하였다. 가속계수는 무고장 정상 시험 2,418시간에 대한 가속시험 160시간에 상당하며, 그 값은 15.09로 계산되었다.
where, : acceleration factor
: life on test load
: life on field load
: test torque (%)
: field torque (%)
등가 토크는 트랙터를 이용하여 여러 작업을 할 때 발생하는 불균일한 토크를 rain-flow counting법으로 사이클(mean-range-cycle)로 분류한 후, 각 사이클의 크기와 반복 횟수를 Miner 누적손상법칙에 따라 손상으로 환산하고, 이를 동일한 손상을 유발하는 일정한 토크 값으로 정의하였다. 등가 토크는 식(7)을 이용하여 계산하였다(Baek et al., 2019).
where, : equivalent torque (Nm)
: ratio of
: number of cycle for total range
: number of cycle for total range
: torque of each range (Nm)
𝜆 : fatigue damage exponent
본 연구에서는 위 방법을 적용하여 동급 엔진 트랙터와 유사한 조건에서 계측한 데이터를 분석하였으며, 등가 토크는 설계 토크의 약 57% 수준으로 산출되었다. 재료의 피로수명지수는 변속기의 경우 기계적 하중을 가했을 때 발생되는 피로도에 대한 T-N curve의 기울기를 의미한다(Chen et al., 2025). 본 연구에서는 변속기(transmission, TM) 내부에서 가장 취약한 고장인 기어의 치면 pitting에 대해 피로수명지수 7 (ISO, 2019)을 적용하였다. Table 4를 이용하여 산출한 시험 토크는 83.99%로 나타났다.
Table 4.
Durability test conditions for this study.
| Item | Value | Resources |
| Zero-failure test time (h) | 2,418 | Nelson (1990) |
| Fatigue life coefficient | 7 | ISO (2019) |
| Acceleration test time (h) | 160 | Nelson (1990) |
| Acceleration factor | 15.09 | Nelson (1990) |
| Field torque (%) | 57 | Test criteria for company |
| Test torque (%) | 83.99 | Calculated |
1,000시간 수명 보증을 위한 160시간의 가속시험의 인가 토크는 설계 토크의 84% 수준으로 산출되었다. 농작업 종류에 따라 기어 단수가 구분되며, 1단에서는 로타리 경운, 쟁기 경운, 로더 작업, 2단에서는 트레일러 작업을 수행한다. 가속시험의 인가 회전속도는 입력 회전수를 각 단수별 기어비로 나누어 계산하였으며, 1단에서는 82.9, 2단에서는 2단에서는 49.5로 나누어 각각 36.2, 60.6으로 계산되었다. 따라서, 160시간에 대한 단수별 시험 조건은 Table 5와 같다.
Table 5.
Conditions of the transmission durability test.
Source: Kim (2025).
다이나모 시험
전기구동 트랙터의 감속기 내구시험은 전기 모터를 제외한 동력전달시스템 조립체 상태에서, 동력전달시스템의 입력축을 다이나모의 입력축에 연결하고, 후차축 flange와 부하 모터의 gear coupling flange에 연결하였다. 입력 모터의 회전수를 입력 회전수에 맞추었으며, 부하 모터의 토크를 시험 조건 상 인가 토크 값에 맞추었다. 시험 시, 기어의 윤활과 냉각을 위해 TM오일을 별도의 쿨러 장치를 이용하여 냉각하였으며, 단수별 시험 조건을 분배하여 160시간에 대해 Fig. 3과 같이 구성된 3축 다이나모를 이용하여 감속기 내구시험을 수행하였다.
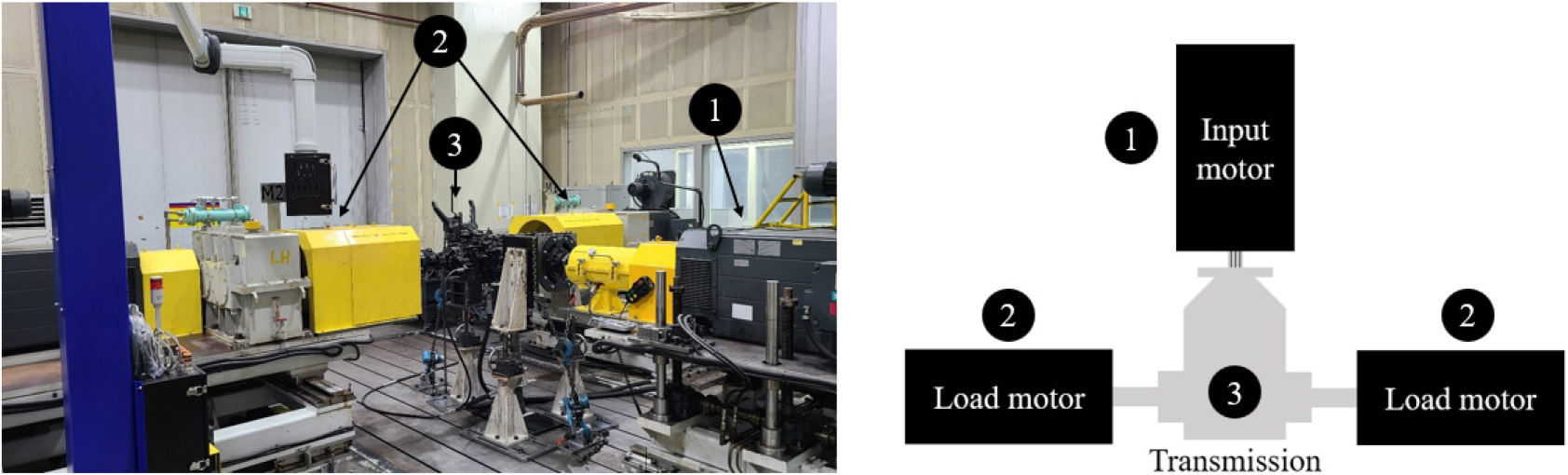
Fig. 3.
A schematic of the transmission durability test using 3-axis dynamometer used in this study. Source: Kim (2025).
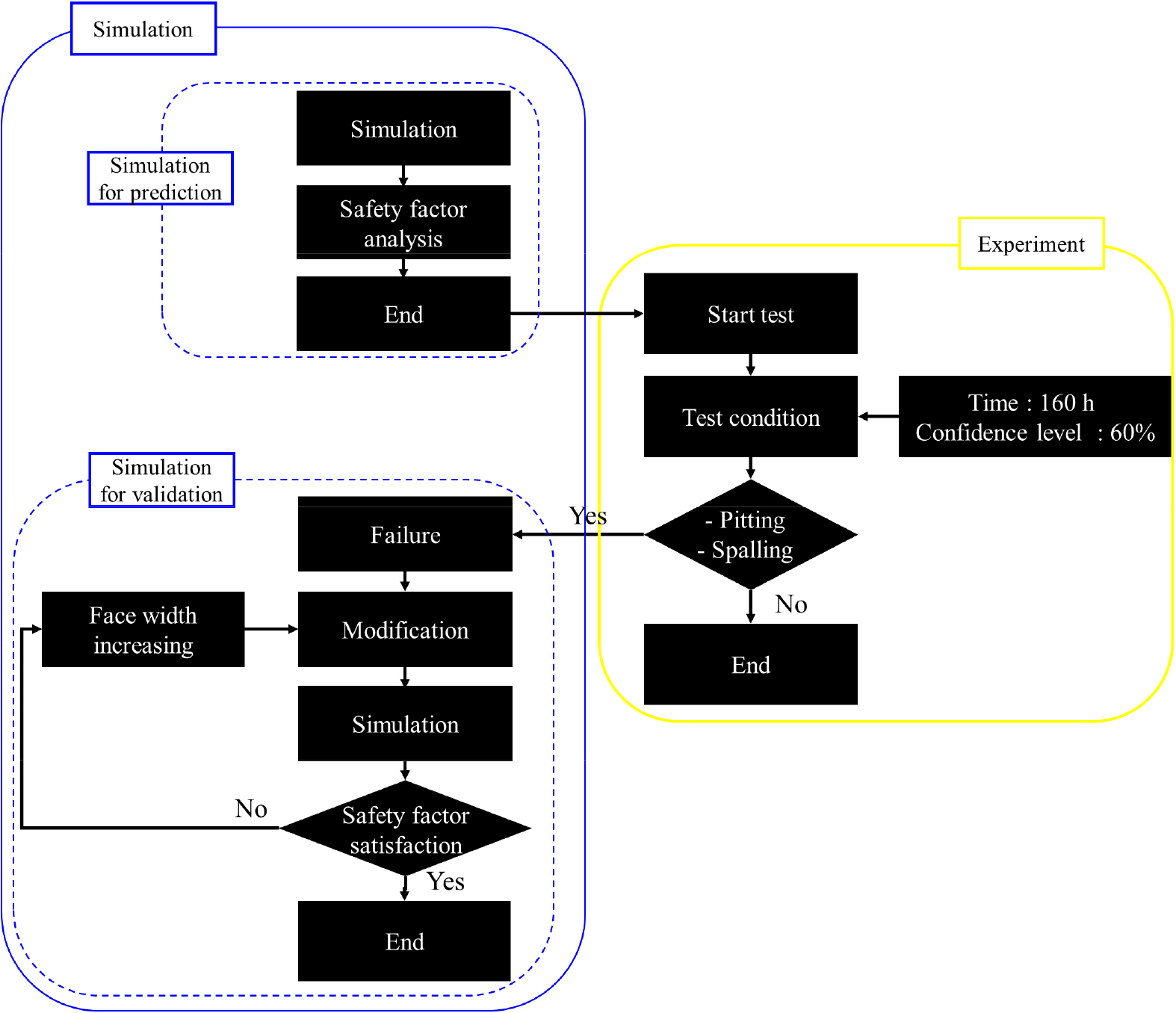
감속기 내구시험 및 개선 과정은 Fig. 4와 같으며, 감속기 내구 시험 후 pitting 및 spalling이 없는 경우 내구성을 만족한다. Pitting 및 spalling이 있는 경우, 감속기 시뮬레이션 모델이 손상된 기어 치폭을 수정하여, 내구 시뮬레이션을 수행하여 기어의 굽힘 및 접촉 안전율을 분석하였다.
Results and Discussion
동력전달시스템
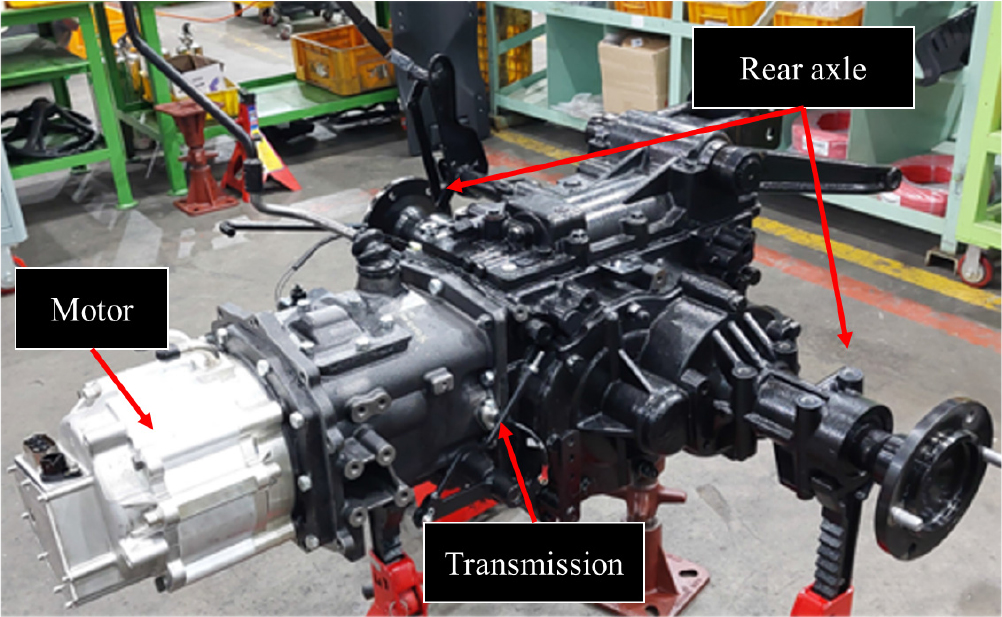
20 kW급 싱글 모터 타입 소형 전기구동 트랙터의 동력전달시스템 시작품은 Fig. 5와 같으며, 부변속 2단의 변속기, 최종 구동부가 포함된 후차축 그리고 케이스로 구성하였다. 또한, 변속기의 전면부에 모터 조합체를 조립하였다.
기어 해석 결과
기어 굽힘 안전율 해석 결과는 Table 6과 같다. Spiral bevel의 wheel과 pinion의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.23, 1.19로 나타났다. Main drop의 drive, driven, PTO의 left flank 안전율은 각각 50, 1.73, 2.62로 나타났으며, right flank 안전율은 2.10, 1.39, 50으로 나타났다. 1st gear의 drive, driven의 left flank 안전율은 각각 2.90, 2.69로 나타났으며, right flank 안전율은 모두 50으로 나타났다. 2nd gear의 drive, driven의 left flank 안전율은 모두 3.62로 나타났으며, right flank 안전율은 모두 50으로 나타났다. PTO gear의 drive, driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 3.69, 3.39로 나타났다. Final drive의 left drive, left driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.86, 1.66으로 나타났다. Final drive의 right drive, right driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.98, 1.77로 나타났다.
Table 6.
Simulation results of the gear bending safety factor.
Source: Kim (2025).
기어 굽힘 안전율 해석 결과, spiral bevel 기어의 pinion에서 굽힘 안전율은 1.19로 모든 기어쌍 중에서 가장 낮은 것으로 나타났다. 또한, 안전율이 50이 나온 경우는 주로 driver 기어로, 동력이 전달될 때 부하가 driven 기어에 집중되거나 또는 SCM420H 재질을 사용하거나, 충분한 모듈 및 치폭이 확보된 경우로 판단된다.
기어 접촉 안전율 해석 결과는 Table 7과 같다. Spiral bevel의 wheel과 pinion의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.24, 1.12로 나타났다. Main drop의 drive, driven, PTO의 left flank 안전율은 각각 50, 1.54, 1.52로 나타났으며, right flank 안전율은 각각 1.28, 1.32, 50으로 나타났다. 1st gear의 drive, driven의 left flank 안전율은 각각 1.54, 1.60으로 나타났으며, right flank 안전율은 모두 50으로 나타났다. 2nd gear의 drive, driven의 left flank 안전율은 각각 1.85, 1.86으로 나타났으며, right flank 안전율은 모두 50으로 나타났다. PTO gear의 drive, driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.57, 1.66으로 나타났다. Final drive의 left drive, left driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.26, 1.48로 나타났다. Final drive의 right drive, right driven의 left flank 안전율은 모두 50으로 나타났으며, right flank 안전율은 각각 1.15, 1.36으로 나타났다.
Table 7.
Simulation results of the gear contact safety factor.
Source: Kim (2025).
기어 접촉 안전율 해석 결과, spiral bevel 기어의 pinion에서 접촉 안전율은 1.12로 모든 기어쌍 중에서 가장 낮은 것으로 나타났다. 또한, 50의 안전율이 나오는 경우는 동력전달 경로에서 제외되어 시뮬레이션 동안 기어에 실제 하중이 거의 걸리지 않았기 때문인 것으로 나타났다.
따라서, 동력전달시스템의 모든 기어쌍에서 접촉 및 굽힘 강도에 대한 목표 안전율을 만족하는 것으로 판단된다.
베어링 해석 결과
베어링 손상률 및 안전율 해석 결과는 Table 8과 같다. Input shaft의 bearing 1, 2는 손상률이 각각 0.21%, 0.012%로 매우 낮게 나타났으며, 안전율은 각각 5.25와 13.56으로 나타나 충분한 내구 여유를 확보한 것으로 나타났다. Main drive shaft의 bearing 1, 2는 손상률이 각각 1.37%, 0.29%로 다른 축에 비해 상대적으로 높게 나타났으나, 여전히 100% 대비 매우 낮은 수준으로 나타났다. 안전율 또한 각각 3.02, 4.94로 기본적인 설계 요구조건을 충족하는 것으로 나타났다. Main driven shaft의 bearing 1, 2, 3은 손상률이 모두 0.3% 이하로 낮게 나타나 안정적인 것으로 판단된다. PTO shaft의 8개 베어링 중 7개는 손상률이 0.05% 이하이며, 안전율도 모두 5 이상으로 안정적인 것으로 나타났다. 다만 bearing 6는 손상률이 2.18%로 다른 bearing에 비해 높게 나타났으며, 안전율 또한 2.85로 다른 bearing 보다 낮은 것으로 나타났다. Rear axle shaft의 bearing 1, 2는 손상률이 각각 0.062%, 0.34로 낮은 것으로 나타났으며, 안전율은 약 8으로 나타나 충분한 내구 여유를 확보한 것으로 나타났다. 그러나, rear axle left와 rear axle right의 bearing 2, 3은 손상률이 각각 18 - 59%로 매우 높게 나타났으며, 안전율 또한 최대 2.72, 최소 1.30으로 나타나 전체 베어링 중 가장 취약한 부위로 나타났다.
Table 8.
Simulation results of bearing life.
Source: Kim (2025).
대부분의 베어링은 충분한 안전 여유를 확보하였으나, rear axle과 PTO shaft의 bearing에서는 상대적으로 안전율이 낮게 나타났다. 특히 rear axle right의 bearing 3에서는 손상률 58.69%, 안전율 1.30으로 나타나 내구성이 가장 낮게 나타났다.
그러나, 동력전달시스템의 모든 베어링에서 목표 안전율을 만족하는 것으로 나타났다.
감속기 내구시험 결과
감속기 내구시험 결과, 무고장 가속수명 시험 중 이상 진동, 소음, 누유는 발생하지 않았다. 또한, 목표수명 시험시간 160시간 종료 후 이상 없이 정상적으로 작동되는 것으로 나타났다.
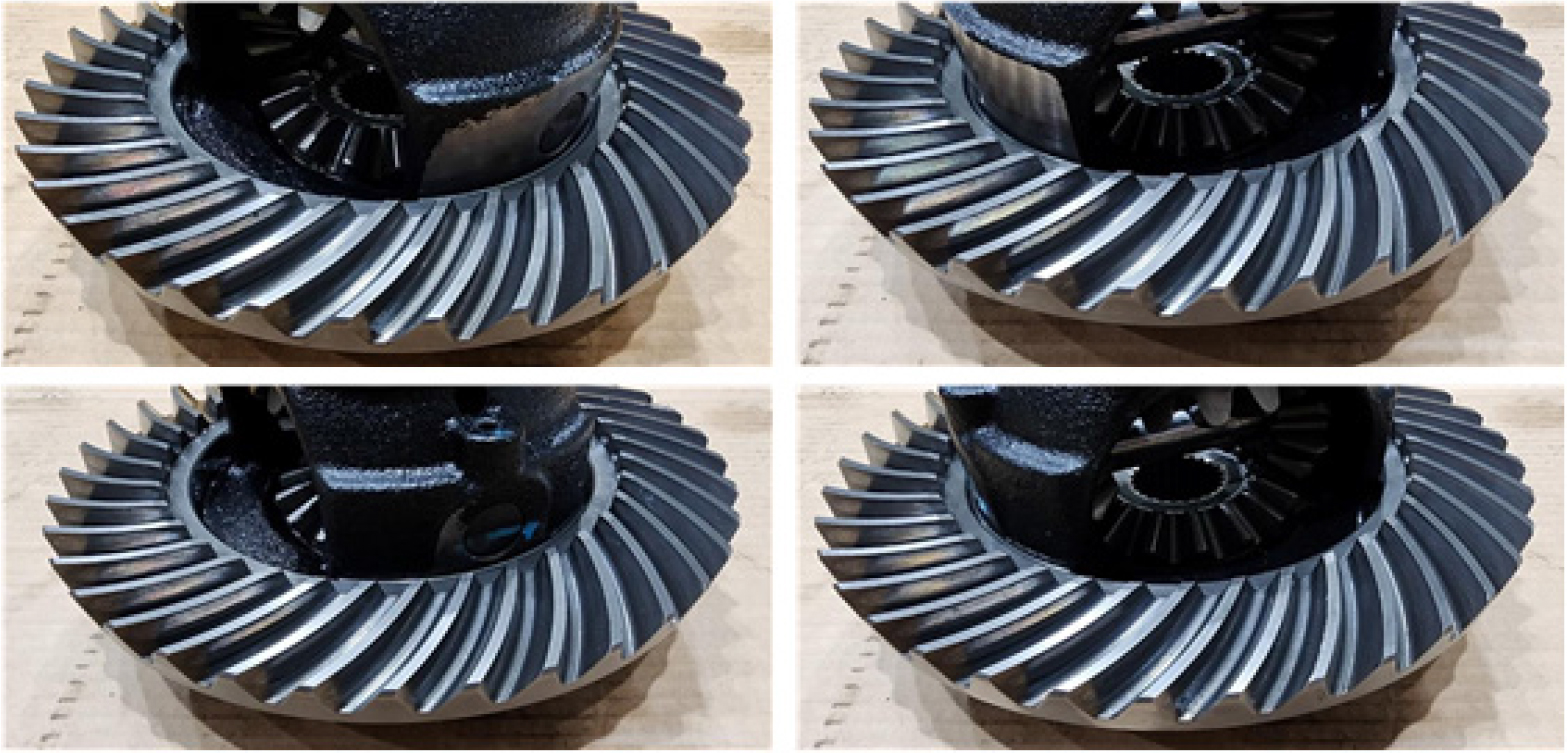
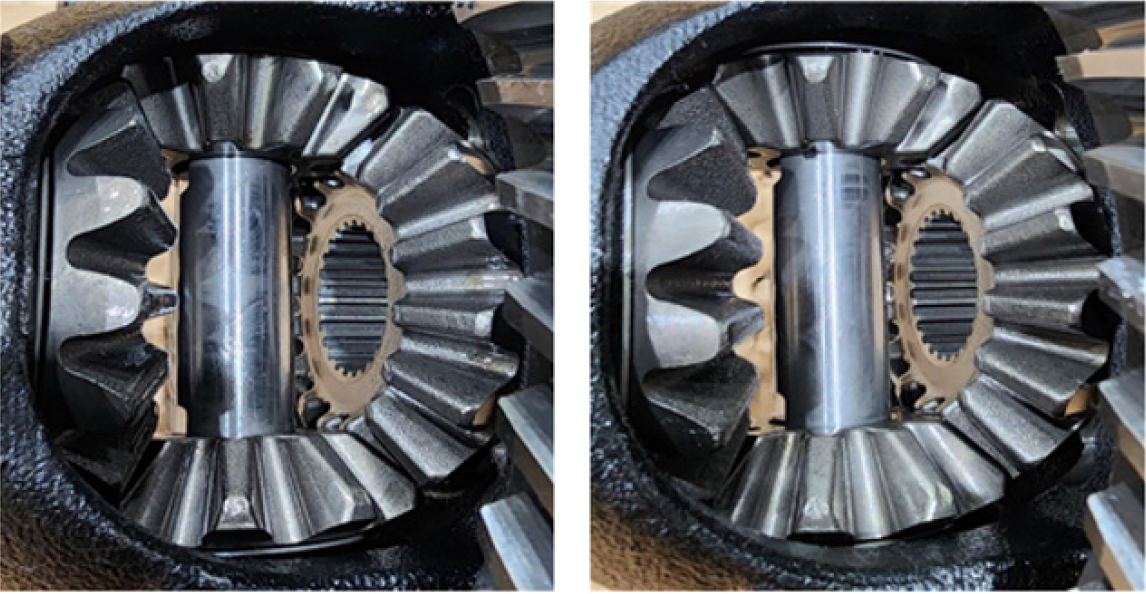
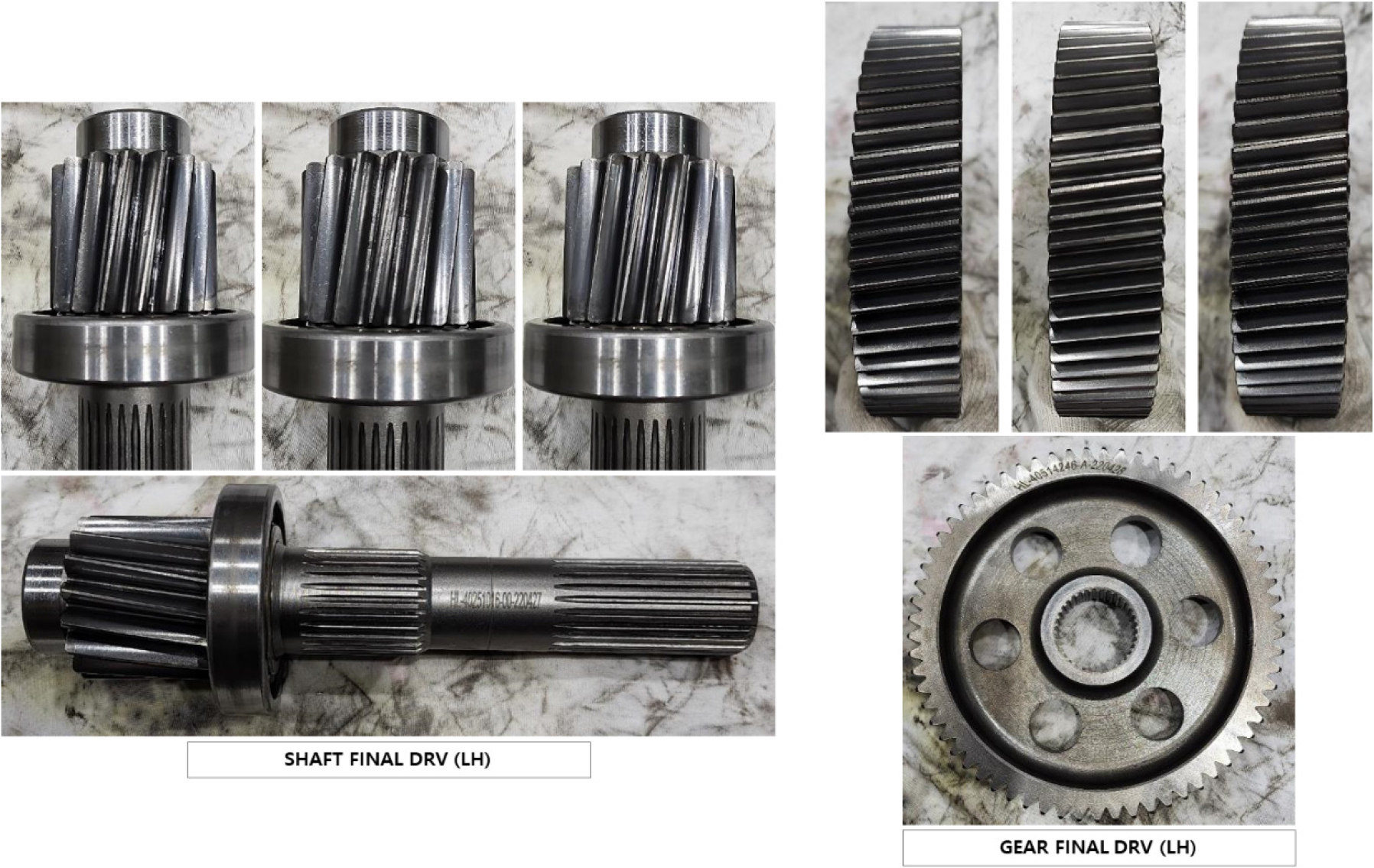
감속기 분해 검사 결과, Fig. 6과 같이 wheel gear에서는 파손이 없는 것으로 나타났다. Differential pinion gear에서는 Fig. 7과 같이 한 개 치에서 spalling이 발견되었으나, 치뿌리 파손이 아닌 spalling으로 확인되어 평가 기준을 만족하는 것으로 나타났다. Differential geartrain, range shift gear set에서는 각각 Figs. 8과 9와 같이 파손이 없는 것으로 나타났다. Final drive gear (LH), final drive gear (RH)에서는 각각 Figs. 10과 11과 같이 파손이 없는 것으로 나타났다.
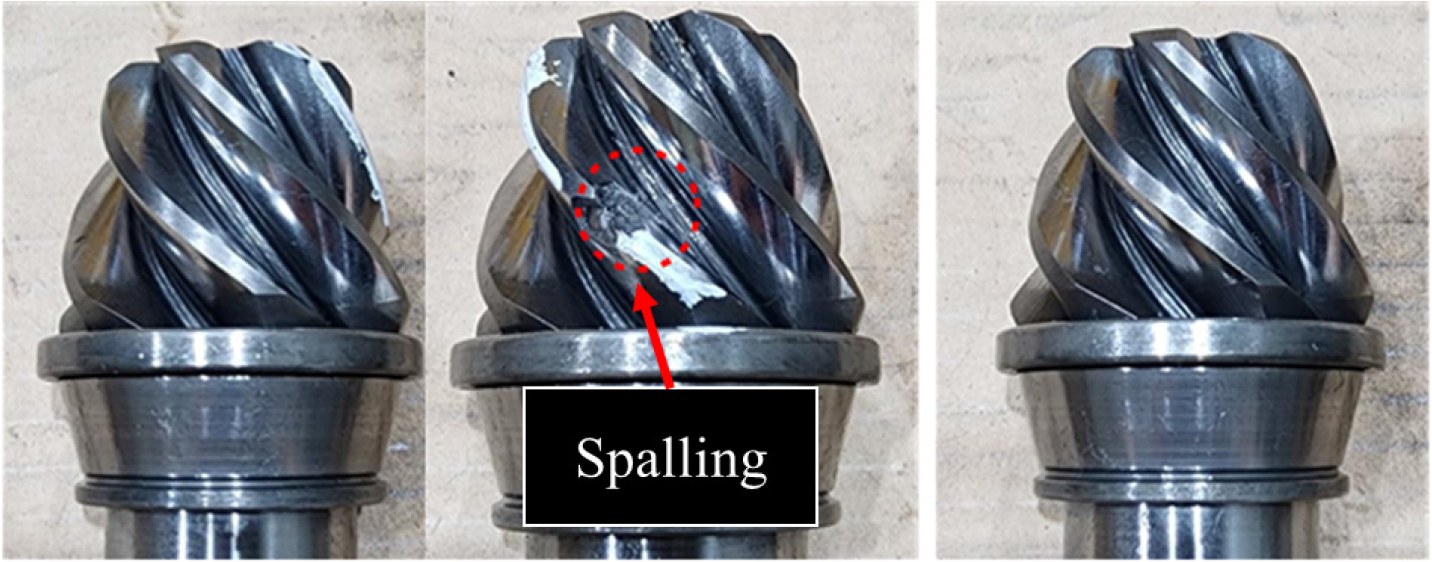


또한, 베어링 및 하우징에서는 Fig. 12와 같이 파손 및 이상 마모는 없는 것으로 나타났다. Spalling이 발견된 differential pinion gear는 내구성 보완을 위해 개선이 필요하며, 본 연구에서는 치폭을 수정하여 개선을 수행하였다.

감속기 내구성 개선
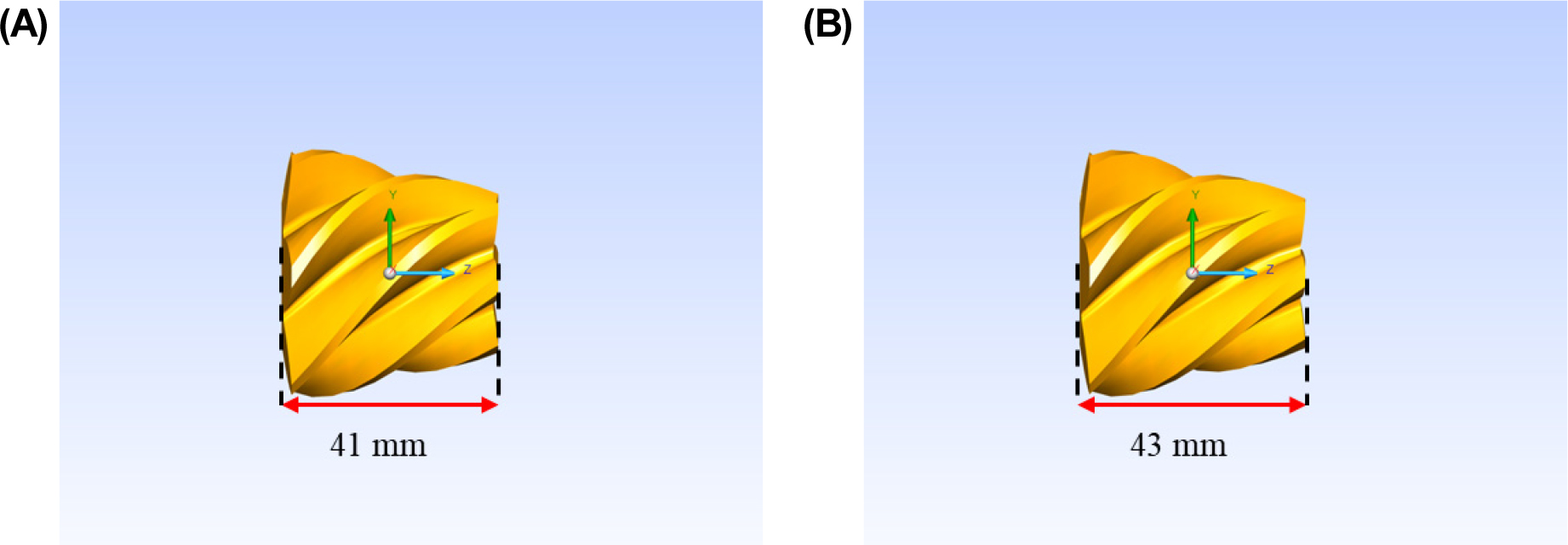
본 연구에서는 감속기 내구시험 결과 spalling이 일어난 pinion 기어 치폭을 Fig. 13과 같이 41에서 43으로 수정하여 감속기를 개선하였다. 이후, Table 3과 동일한 조건에서 시뮬레이션을 수행하였다.
개선 감속기 시뮬레이션 결과, 기어 굽힘 및 접촉 안전율 해석 결과는 각각 Tables 9와 10과 같다. Spiral bevel 기어의 pinion에서 굽힘 및 접촉 안전율은 각각 1.71, 1.32로 기존 대비 각각 약 44%, 18% 향상된 것으로 나타났다. 앞서 수행한 방법과 동일한 방법으로 다이나모 시험을 수행하였으며, 시험 결과 differential pinion gear에서도 spalling이 발생되지 않아 목표 수명 및 내구성을 만족함을 알 수 있었다.
Table 9.
Results of the improved gear bending safety factor.
Source: Kim (2025).
Table 10.
Simulation results of improved gear contact safety factor.
Source: Kim (2025).
Conclusion
본 연구는 국내 20 kW급 전기트랙터 개발을 위해 전기트랙터 동력전달시스템을 설계하였으며 상용 소프트웨어를 이용하여 동력전달시스템 시뮬레이션 모델을 개발하였다. 이후 시뮬레이션 모델에 농작업 부하데이터를 입력하여, 기어, 베어링에 대해 목표 수명 만족여부를 분석하여 내구성을 분석하였으며, 실차 시험과의 비교를 통해 동력전달시스템을 검증하였다. 이후, 동력전달시스템 개선을 수행하여 개선된 동력전달시스템에 대해 내구성을 재분석하였다.
기어 해석 결과, 굽힘 및 접촉 안전율은 spiral bevel기어의 pinion에서 각각 1.19, 1.12로 가장 취약한 것으로 나타났으나, 모든 기어쌍에서 목표 안전율을 만족하는 것으로 판단된다. 베어링 해석 결과, 후차축 right bearing 2에서 58.69%로 손상률이 가장 높은 것으로 나타났으며, 베어링 안전율 또한 1.3045로 가장 낮게 나타났으나, 모든 베어링에서 목표 수명을 만족하는 것으로 판단된다.
이후, 감속기 내구시험을 수행하여 분해 검사 결과를 확인하였으며, differential pinion 기어 한 개 치에서 spalling이 발견되었으나, 치뿌리 파손이 아닌 spalling으로 확인되어 평가 기준을 만족하는 것으로 나타났다. 내구시험 결과, 파손된 spiral bevel 기어의 치폭을 변경하여 안전율을 분석하였으며, 기어의 굽힘 및 접촉 안전율은 각각 1.71, 1.32로 기존 대비 각각 약 44%, 18% 향상된 것으로 나타났다. 또한, 내구시험을 동일한 방법으로 수행하여 differential pinion gear에서도 spalling이 발생되지 않아 목표 수명 및 내구성을 만족함을 알 수 있었다.
본 연구는 20 kW급 전기구동 트랙터의 동력전달시스템 내구성 평가를 수행하여 내구성을 검증하였다. 그러나 시뮬레이션 입력 조건의 단순화, 설계 변수 최적화 등 한계가 존재한다. 따라서, 향후 연구에서는 다양한 농작업 조건에서의 실차 계측을 기반으로 시뮬레이션 입력 조건을 선정하고, 설계 변수 최적화를 통한 검증을 수행함으로써 연구의 완성도를 향상시킬 예정이다. 또한, 전기 트랙터의 성능 시험을 통해 성능을 검증할 예정이다.
