

Introduction
Materials and Methods
20 kW급 전기 트랙터 동력전달시스템 설계
전기 트랙터 시뮬레이션 모델 개발
전기 트랙터 농작업 성능 측정
Results and Discussion
전기 트랙터 농작업 성능
Conclusion
Introduction
지속적인 환경 오염으로 세계 각국은 디젤 엔진의 배기가스 저감을 위하여 노력하고 있다(Baek et al., 2024a). 이와 관련하여 각종 환경 규제 및 농업기계 및 건설기계를 포함하는 비도로 이동오염원에 대한 배출가스 규제도 점차 강화되고 있다(Kim et al., 2023). 현재 농업 및 건설용 오프로드 차량을 포함한 비도로 이동오염원의 국내 대기오염 물질 배출 부문 중 NOX 기준 26%, PM-10 기준 16%로 매우 높은 비율을 차지하고 있다(Kim, 2025). 또한 트랙터를 활용한 농작업 중 대표적인 경운 작업이 소요동력이 높은 만큼 연료 소비량 및 배기가스로 인한 환경문제에 대한 우려도 제시되고 있다(Bae et al., 2024). 이에 따라, 지속적으로 확대되는 국내 농업기계 시장의 농업기계 분야 또한 친환경 동력원 농업기계의 개발이 이루어지고 있다(KAMICO and KSAM, 2024).
Baek 등(2020)은 총륜구동(all-wheel-drive, AWD) 시스템이 적용된 전기구동 트랙터의 시뮬레이션 모델을 개발하여 실제 쟁기 작업 부하 계측 데이터 기반 작업 가능 시간 분석 연구를 수행하였다. Park 등(2024)은 밭 농업에서 다목적으로 사용 가능한 전기구동 차량의 시뮬레이션 모델을 개발하여 타이어 물성 및 주행 데이터를 모델에 반영하여 전기구동 차량의 시뮬레이션 모델의 정확도를 분석하였다. Baek 등(2024b)은 전기 트랙터를 개발하기 위한 기초 연구로 상용 소프트웨어를 활용한 전기 트랙터 듀얼 모터 파워트레인 구조에 대한 내구 해석 연구를 수행하였다. Yang 등(2024)은 4륜 독립 조향(4-wheel steering, 4WS) 주행 전기구동 플랫폼 동역학 시뮬레이션 모델을 개발하여 조향 모드에 따른 차축 토크 출력을 분석하여 주행 제어 모델 개발을 위한 토크 범위를 분석하였다. Park 등(2025)은 25 kW급 전기 트랙터 1D 시뮬레이션 모델을 개발하여 전기 트랙터 핵심 부품인 모터 및 배터리 성능 평가 연구를 수행하였다.
위와 같은 선행연구처럼 시뮬레이션 소프트웨어는 시간 및 비용 감소에 이점을 가질 수 있으나 신뢰성 향상을 위한 검증은 필수적이다. 따라서 본 연구는 전기 트랙터 개발 기초 연구로 전기 트랙터 동력전달시스템 및 시뮬레이션 모델을 개발하여 검증을 수행하였으며, 신뢰성 향상을 위해 실제 전기 트랙터 검증 데이터와 비교 분석하여 전기 트랙터 성능 평가 연구를 수행하였다.
Materials and Methods
20 kW급 전기 트랙터 동력전달시스템 설계
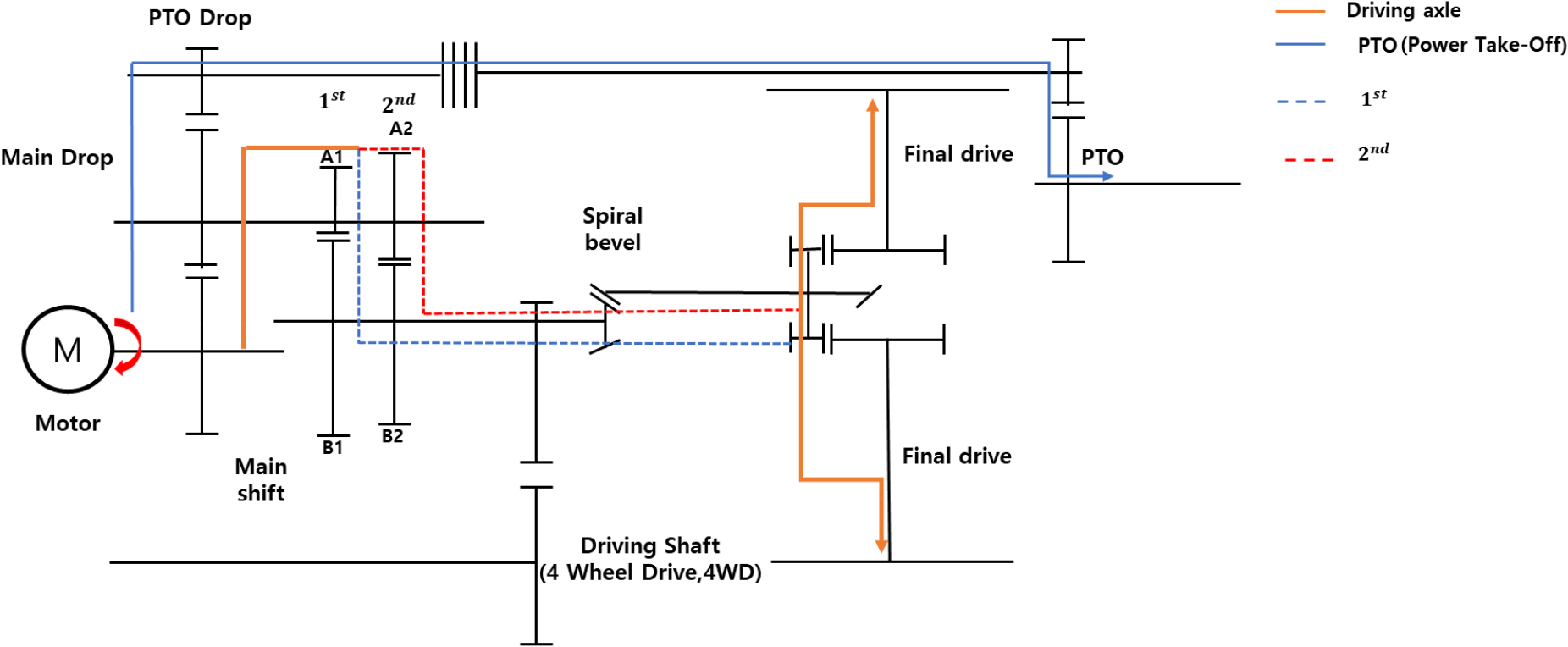
본 연구에 사용된 전기 트랙터는 single-motor 타입이며, 모터 출력은 부변속 2단(L단, M단) 및 동력 취출 장치(power take-off, PTO)로 분기된다. Single-motor 타입의 전기 트랙터는 기존의 내연기관의 엔진 및 주변속을 모터로 대체하였으며, PTO 회전수와 주행속도가 서로 연동되어 독립제어가 불가하므로 PTO를 사용하는 로터리 작업의 주행속도 4.0 km·h-1와 PTO 회전수 540 rpm를 기준으로 기어비를 조정하였다. 동력전달시스템은 Fig. 1 (Kim, 2025)과 같이 크게 모터, 변속기, 차축, 휠로 구성되어있다. 전기 트랙터의 주행 속도는 각각의 단수에서 최대 7.6 km·h-1 (L단), 12.7 km·h-1 (M단)이다.
전기 트랙터 시뮬레이션 모델 개발
전기 트랙터의 시뮬레이션 모델은 Fig. 2 (Kim, 2025)와 같이 1-D software SimulationX (ESI ITI, 2022)를 통해 개발하였다. 시뮬레이션 모델은 전기 시스템(electrical systems), 제어시스템(control systems), 기계시스템(mechanical systems) 및 부하 데이터 입력모델(load data input model)로 구성하였다. 또한 전기 트랙터 제원은 Table 1과 같이 컴팩트 트랙터 중 19 - 30 kW (25 - 40 hp) 트랙터 사양을 기반으로 무게 1,400 kg, 정격출력 20 kW급 모터 및 28 kWh의 배터리 등의 주요 부품의 사양을 선정하였으며, 주요 부품의 사양은 시뮬레이션 입력 파라미터로 활용하였다. 전기 시스템은 모터, 인버터 및 배터리로 구성하였다. 모터는 토크, 출력, 효율 및 속도 명령 파라미터 입력이 가능하고 속도 명령 파라미터를 통해 구동된다. 또한 모터는 비례-적분-미분(Proportional-Integral-Derivative, PID) 제어기로 실시간 회전 속도 피드백 제어를 수행한다. 배터리는 용량 및 내부 저항값 입력이 가능하도록 구성하였다. 제어시스템은 목표 속도 및 PID 계수 값을 입력할 수 있는 속도 컨트롤러로 구성하였으며, 모터 출력단에 motion sensor 모델을 장착하여 모터의 회전속도를 PID 제어기로 전달한다. 기계 시스템은 트랜스미션, 휠, 휠-토양 저항 모델로 구성하였다. 기계시스템의 동력 분기는 모터 출력 샤프트로부터 전달받은 동력을 전차축, 후차축 및 PTO로 분기되도록 구성하였다. 또한, 전차축 및 후차축으로 전달되는 동력은 감속기, 디퍼런셜 기어 및 스프링-댐퍼 시스템을 거쳐 각각의 휠에 전달되도록 구성하였다. 부하데이터 입력 모델은 조건에 따라 해석을 진행할 수 있고 농작업 모드를 선택할 수 있도록 switch 방식을 적용하였다. 부하데이터는 시간 기반의 그래프로 입력되며, 휠 회전속도는 위성항법 시스템(Global Navigation Satellite System, GNSS)로부터 측정한 주행 속도값 및 기어비를 고려하여 모터의 타켓 회전속도로 계산되어 활용된다. 시뮬레이션 모델 분석은 부하 데이터 입력 모델에 실제 쟁기 작업 시 계측한 부하데이터(휠 회전속도 및 휠 토크)를 입력하였으며, 차축 토크 및 state of charge (SOC) level 분석을 위해 120초 동안 농작업 모드를 쟁기 작업으로 선정하여 해석을 진행하였다.
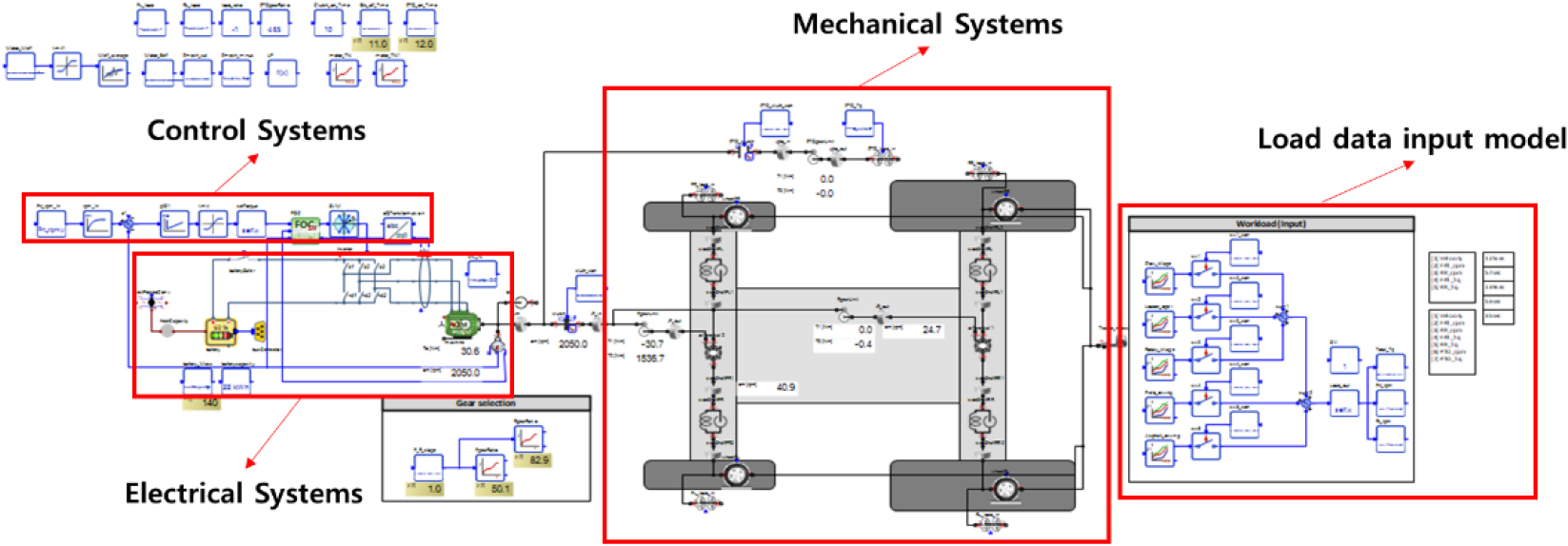
Table 1.
Specification of the 20 kW electric tractor used in study.
전기 트랙터 농작업 성능 측정
부하 계측 시스템 개발
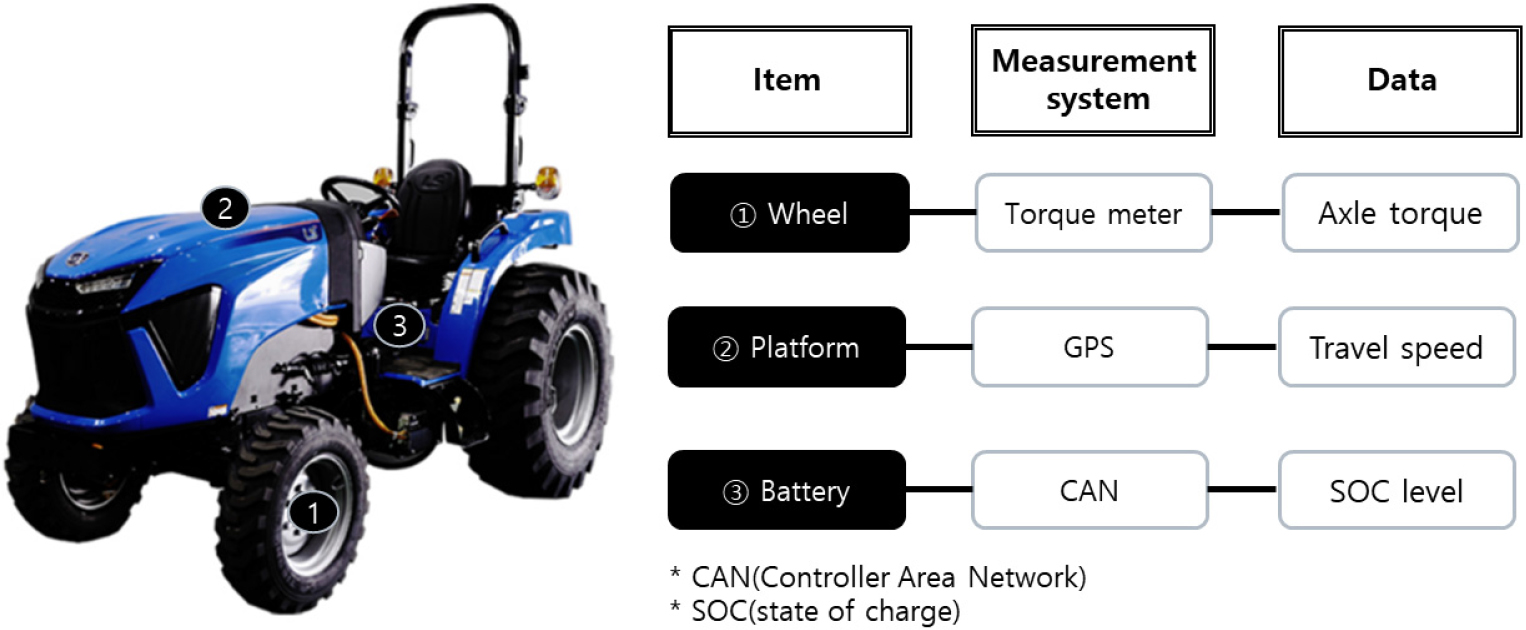
본 연구에서 사용된 계측시스템의 구성은 Fig. 3 (Kim, 2025)과 같이 차축 토크 및 주행 속도 등 데이터를 실시간으로 수집하여 모니터링 가능한 DAQs (Quantum XMX840B, HBM, Germany), 차축 토크측정을 위한 토크미터(XtreMAX, MANNER SensortelemetrieGmbH, Germany), 주행 속도 측정을 위한 RTK INS (Duro Inertial, Swift Navigation Inc., USA)로 구성하였다. 또한, 1회 충전 작업시간 분석을 위해 제조사로부터 CAN (Controller Area Network) ID를 제공받아 CAN 데이터로 배터리 SOC level 데이터를 수집하였다.
농작업 성능 측정 시험
전기 트랙터의 농작업 성능은 측정은 Fig. 4 (Kim, 2025)와 같이 쟁기 작업을 선정하여 검증하였다. 해당 트랙터의 필드 시험은 전북 완주군 은하리 1028-3 (35.956219″N, 127.149882″E)에서 수행하였으며, 해당 필드의 면적은 약 536.3 m2이다. 필드 시험 포장의 토성은 미국 농무부(USDA)법을 이용하여 측정하였으며, 토성의 성분은 미사 50% 이상과 점토 12 - 27%를 함유한 미사질양토(silt loam)이다. 쟁기작업 시 작업기는 3련 이랑 쟁기(DWP100, DAEWOEN Co., Ltd., Imsil, Korea)를 사용하였고, 작업은 L단 작업 단수로 선정하여 수행하였다. 쟁기 작업 수행 시 농작업 패턴은 국내에서 널리 사용하고 있는 C-type을 선정하여, 전진-선회-전진의 순서로 작업을 수행하였으며, 이때 경심은 20 cm를 유지하도록 하였다.

전기 트랙터 1회 충전 작업시간
전기 트랙터의 1회 충전 기반 작업시간은 쟁기 작업 조건에서 실시간 SOC 변화율을 기반으로 산정하였다. 배터리 SOC level은 전기 트랙터의 CAN 신호를 통해 시간 누적 전류값을 이용하여 식(1)을 통해 계산하였다.
where, : battery SOC level at time (%)
: battery initial SOC level (%)
: charge/discharge current (A)
: time (h)
: battery capacity (Ah)
농작업 성능 비교·분석
전기 트랙터의 농작업 성능 평가를 위해 전·후 차축 토크 및 1회 충전 작업시간 비교·분석을 수행하였다. 전기 트랙터 농작업 성능 비교·분석은 산출된 데이터(전·후 차축 토크 및 SOC level)를 조건으로 사용하였다. 통계 분석은 통계 소프트웨어인 IBM SPSS Statistics (IBM, 2025)를 활용하여 시뮬레이션 해석 결과와 계측 데이터(차축 토크, SOC level)의 차이를 쌍체표본 t-검정(paired t-test)을 통해 비교 분석하였다. 이때, 쌍체표본 t-검정(paired t-test)는 식(2)를 통해 계산하였다.
where, , : sample means of group
, : sample variances of group
, : sample sizes of group
Results and Discussion
전기 트랙터 농작업 성능
전기 트랙터 쟁기 작업 시 차축 토크 데이터
쟁기 작업 시 전기 트랙터의 전차축 토크의 측정 및 시뮬레이션 값은 Fig. 5와 같다. 쟁기 작업 조건에 따라 급격한 부하 변동이 나타났고 측정 및 시뮬레이션 값은 유사한 경향을 보여줬다. 전기 트랙터의 전차축 토크는 Table 2와 같이 측정된 전차축의 최대 및 평균 토크는 각각 916.08 Nm, 369.78 Nm이고 시뮬레이션을 활용하여 측정한 전차축의 최대 및 평균 토크는 892.91 Nm, 372.08 Nm이다. 전기 트랙터 전차축 토크의 측정된 값과 시뮬레이션 시뮬레이션의 최종 값은 유사한 결과를 보였다. 쌍체표본 t-검정 결과(p > 0.05) 전차축의 토크는 시뮬레이션 결과와 실제 측정 결과가 유의한 차이가 없음을 알 수 있다.
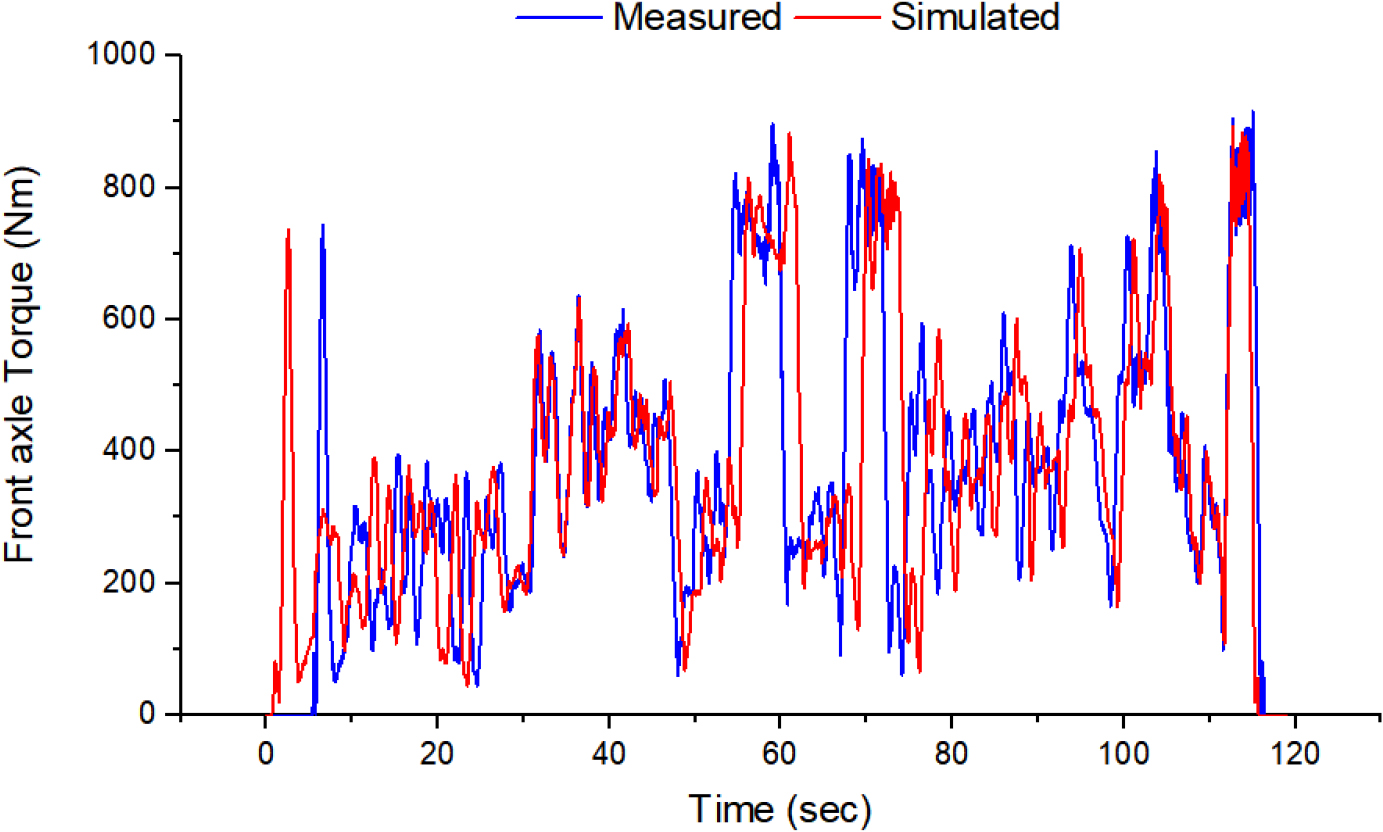
Table 2.
Comparison of the measured and simulated front axle torque.
| Agricultural operation | Axle |
Measured axle torque (Nm) |
Simulated axle torque (Nm) | p-value |
| Plow | Front | 369.78 ± 216.19 | 372.07 ± 203.72 | p = 0.18 (p > 0.05) |
쟁기 작업 시 전기 트랙터의 후차축 토크의 측정 및 시뮬레이션 값은 Fig. 6과 같다. 전기 트랙터의 후차축 토크도 전차축 토크와 동일하게 쟁기 작업 조건에 따라 급격한 부하 변동이 나타났고, 측정 및 시뮬레이션 값이 유사한 경향을 보여줬다. 전기 트랙터의 후차축 토크는 Table 3과 같이 측정된 후차축의 최대 및 평균 측정 토크는 각각 1,519.11 Nm, 1,105.43 Nm이고 시뮬레이션을 활용하여 측정한 후차축의 최대 및 평균 토크는 1,440.96 Nm, 1,165.58 Nm이다. 전기 트랙터의 쌍체표본 t-검정 결과(p > 0.05) 후차축의 토크는 시뮬레이션 결과와 실제 측정 결과가 유의한 차이가 없음을 알 수 있다.
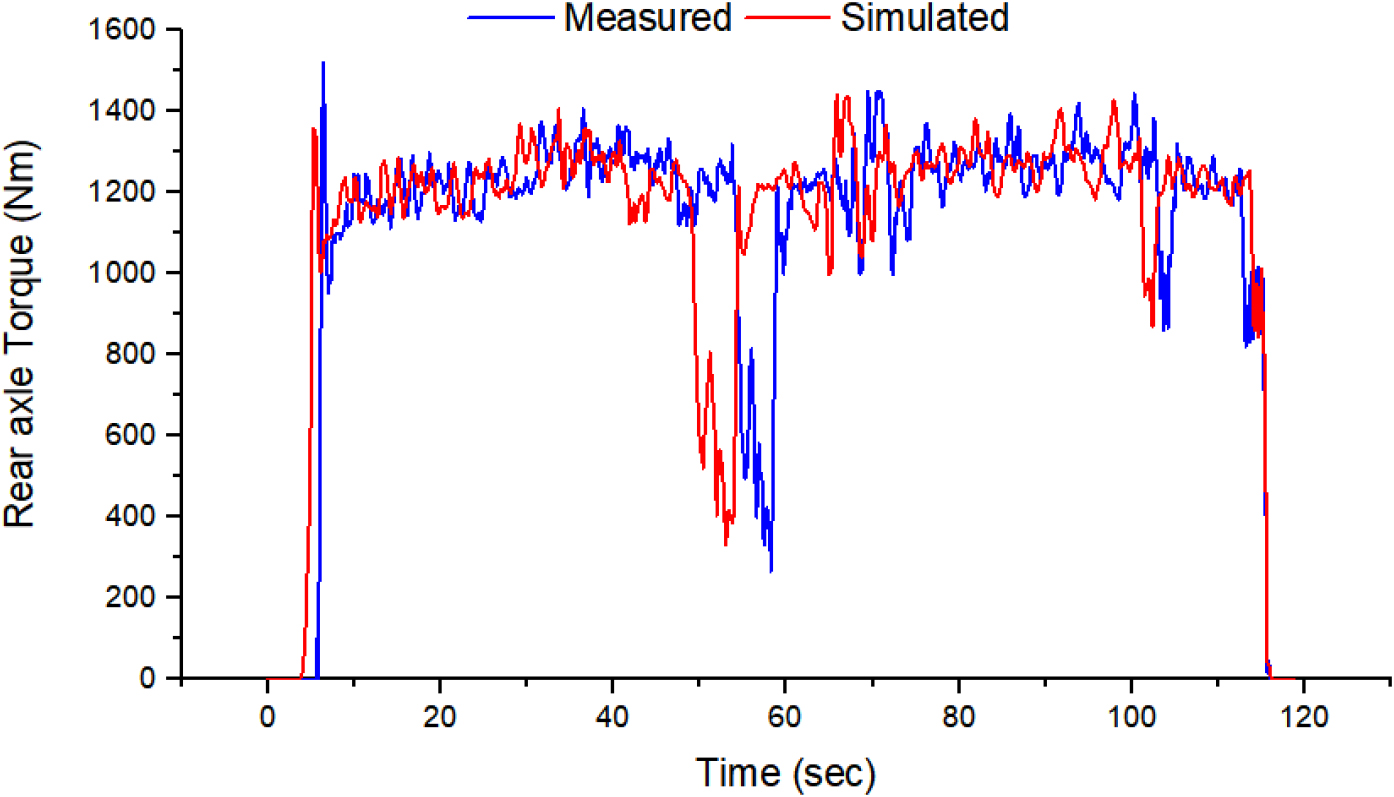
Table 3.
Comparison of the measured and simulated rear axle torque.
| Agricultural operation | Axle |
Measured axle torque (Nm) |
Simulated axle torque (Nm) | p-value |
| Plow | Rear | 1,105.43 ± 359.08 | 1,116.58 ± 337.65 | p = 0.19 (p > 0.05) |
전기 트랙터 쟁기 작업 시 배터리 SOC level
쟁기 작업 시 전기 트랙터의 배터리 SOC level의 측정 및 시뮬레이션 값은 Fig. 7과 같이 SOC 센서의 낮은 분해능에 의하여 측정값 및 시뮬레이션 분석 결과가 완전히 일치하지는 않았지만 경향은 유사하게 나타났다. 또한, 전기 트랙터의 쌍체표본 t-검정 결과(p < 0.05) 배터리 SOC level 시뮬레이션 결과와 실제 측정 결과가 유의한 차이가 있음을 알 수 있다. 쟁기 작업 시 배터리 SOC level 비교·분석 결과는 Table 4와 같이, 부하계측 시험 시 배터리의 초기 및 최종 SOC level은 각각 85.00%와 83.50%로 측정되었으며, 시뮬레이션을 활용하여 분석한 배터리 SOC level의 경우 각각 85.00%와 83.57%로 나타났다. SOC level의 초기값과 시뮬레이션의 최종 값의 차이(SOCfv)는 계측과 시뮬레이션 결과에서 약 0.07%로 나타났다.
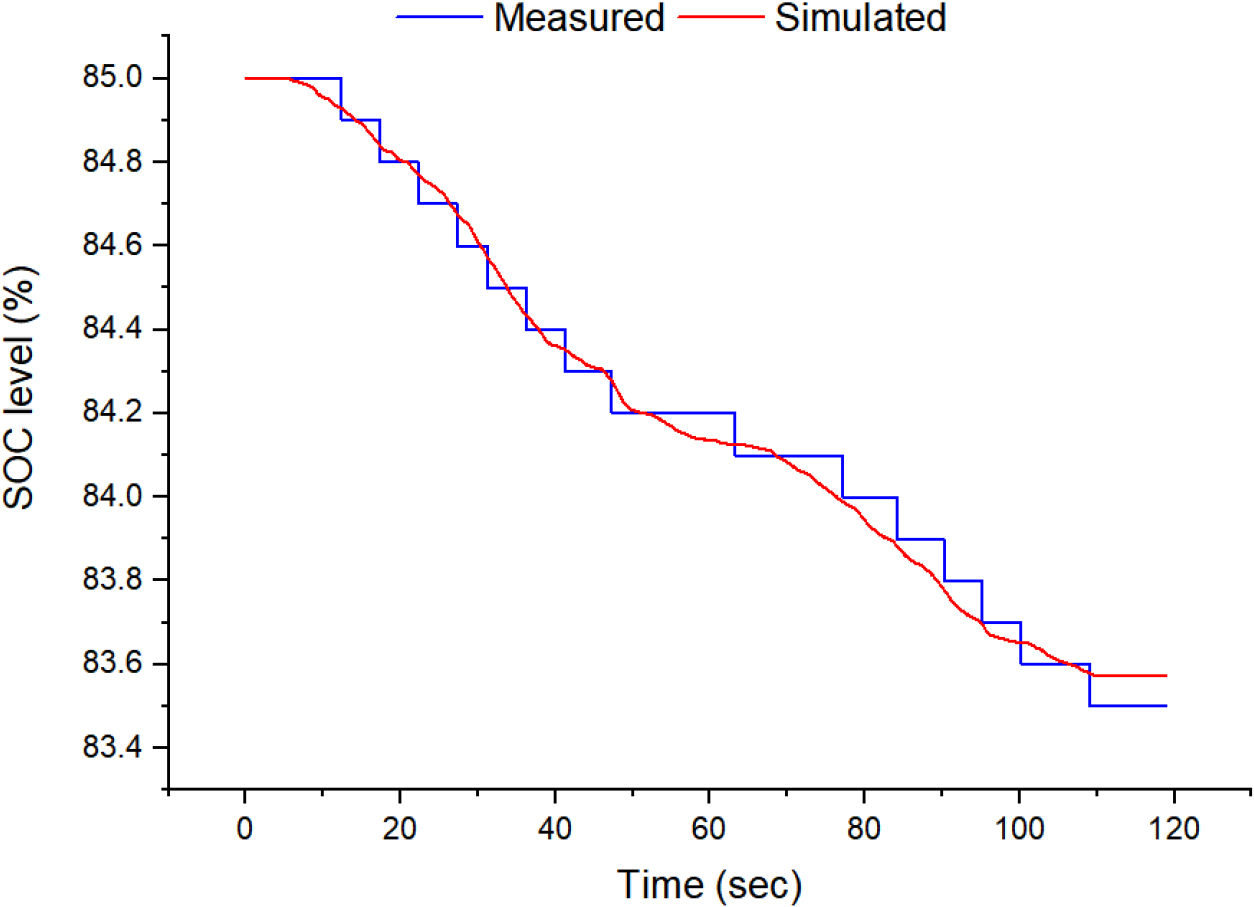
Table 4.
Comparison of state of charge (SOC) level between the measured and simulated results.
| Field conditions | Axle |
Measured SOC level (%) |
Simulated SOC level (%) | p-value | SOCfv (%) | |
| Measured | Simulated | |||||
| Plow | SOC level | 84.22 ± 0.46 | 84.21 ± 0.46 | 1.46 × 10-19 (p < 0.05) | 1.50 | 1.43 |
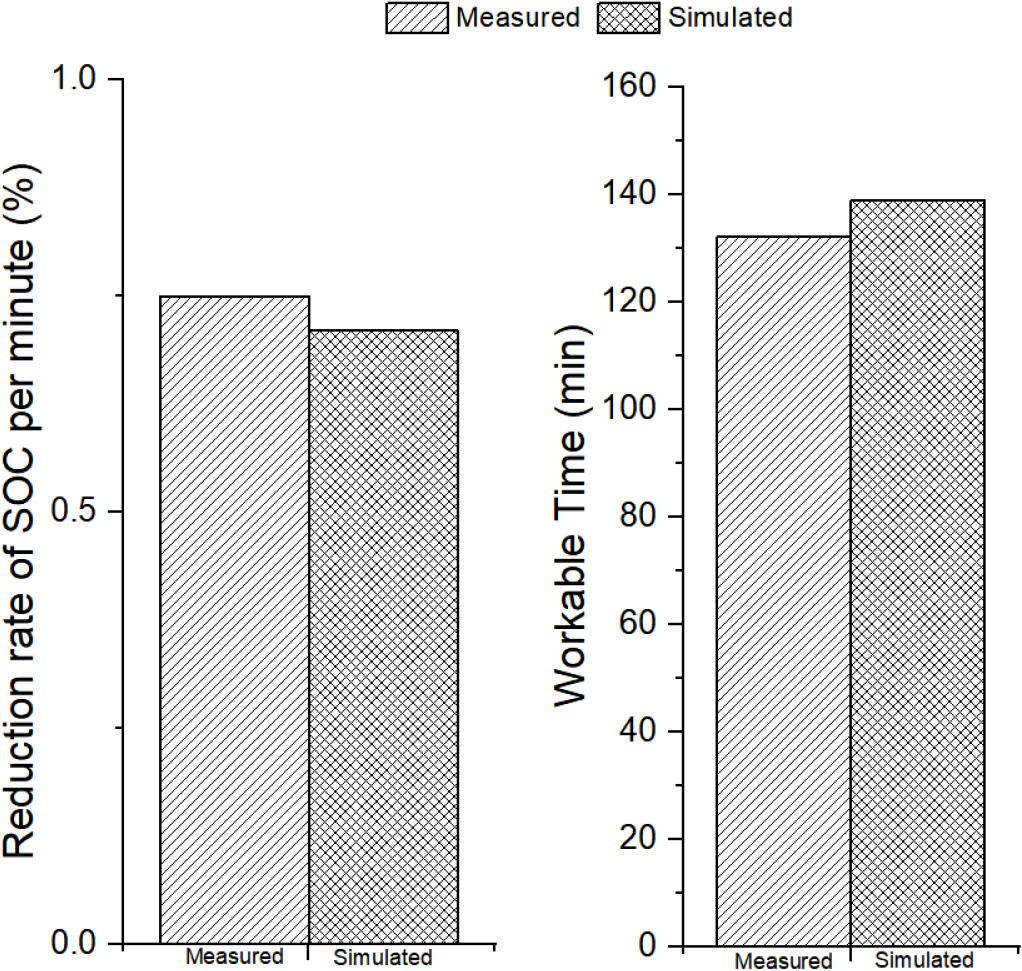
전기 트랙터 1회 충전 작업시간은 분석시간 및 SOCfv를 활용하여 SOC level의 분당 감소율(reduction rate of SOC per minute)을 계산하였다. 부하 계측 시험 및 시뮬레이션 결과의 1회 충전 시 작업 가능 시간은 Fig. 8과 같이 각각 약 132분 및 139분으로 나타났다. 이에 따라, 부하 계측 시험 및 시뮬레이션의 1회 충전 작업 가능 시간 결과는 전기 트랙터 작업 단수 L단에서의 쟁기 작업 수행 시 모두 약 2시간 이상 가능한 것으로 판단된다.
Conclusion
본 연구는 20 kW급 전기 트랙터 동력전달시스템 및 시뮬레이션 모델을 개발하였다. 농작업 성능 분석은 부하 계측 시험 결과 및 시뮬레이션을 활용한 시뮬레이션의 최종 값을 비교 분석하여 전기 트랙터 성능 검증을 수행하였다. 전기 트랙터의 성능 분석은 1회 충전 시 작업시간을 선정하여 분석하였으며, 1D 시뮬레이션 모델을 활용한 분석 및 농작업 성능 분석 시험 결과를 비교 분석하여 전기 트랙터의 성능을 검증하였으며, 주요 결과는 다음과 같다.
1. 20 kW급 전기 트랙터의 1D 시뮬레이션 모델을 개발하여 전·후 차축 토크 및 배터리 SOC level 비교·분석을 수행하였다. 쟁기 작업 시 전기 트랙터의 전·후 차축 토크의 측정 및 시뮬레이션 값 모두 쟁기 작업 조건에서 급격한 부하 변동이 나타났고, 유사한 경향을 보여줬다. 배터리 SOC level 비교·분석 결과 부하계측 시험 시 배터리의 초기 및 최종 SOC level은 각각 85.00%와 83.50%로 측정되었으며, 시뮬레이션을 활용하여 분석한 배터리 SOC level의 경우 각각 85.00%와 83.57%로 나타났다. SOC level의 초기값과 시뮬레이션의 최종 값의 차이(SOCfv)는 계측과 시뮬레이션 결과에서 약 0.07%로 나타났다.
2. 계측 데이터(차축 토크, SOC level)와 시뮬레이션 해석 결과 차이를 쌍체표본 t-검정(paired t-test)을 통해 비교 분석하였다. 쟁기 작업 시 쌍체표본 t-검정 결과(p > 0.05) 전·후 차축의 토크는 시뮬레이션 결과와 실제 측정 결과가 유의한 차이가 없음을 알 수 있었다. 배터리 SOC level은 SOC 센서의 낮은 분해능에 의하여 측정값 및 시뮬레이션 분석 결과가 완전히 일치하지는 않았지만 경향은 유사하게 나타났다. 부하 계측 시험 및 시뮬레이션 결과의 1회 충전 시 작업 가능 시간은 각각 약 132분 및 139분으로 나타났다. 이에 따라, 부하 계측 시험 및 시뮬레이션의 1회 충전 작업 시간은 약 2시간 이상 작업이 가능한 것으로 나타났다.
본 연구는 부하 계측 시험 및 시뮬레이션 결과를 비교·분석하여 전기 트랙터의 작업 성능을 검증하였으며, 1회 충전 시 약 2시간 이상의 작업이 가능한 것으로 나타났다. 하지만 본 연구에서 활용된 시뮬레이션 모델은 실제 가혹한 농작업 환경 및 조건을 반영하지 못하였다는 한계가 있다. 이에 따라, 전기 트랙터의 안정적인 운용을 위해서는 작업 시간 및 배터리 성능 측면에서의 개선이 필요할 것으로 판단된다. 향후 연구에서는 다양한 농작업 부하 계측 시험을 기반으로 전기 트랙터의 성능 평가를 통해 전기구동 시스템에 대한 최적화 연구 및 성능 검증 연구를 수행할 예정이다.
