

Introduction
Materials and Methods
자료 수집
자료 분류
Results
기계 적용 - 농업용 차량 및 로봇
생체 적용 - 가축
생체 적용 - 과수
Discussion
Conclusion
Introduction
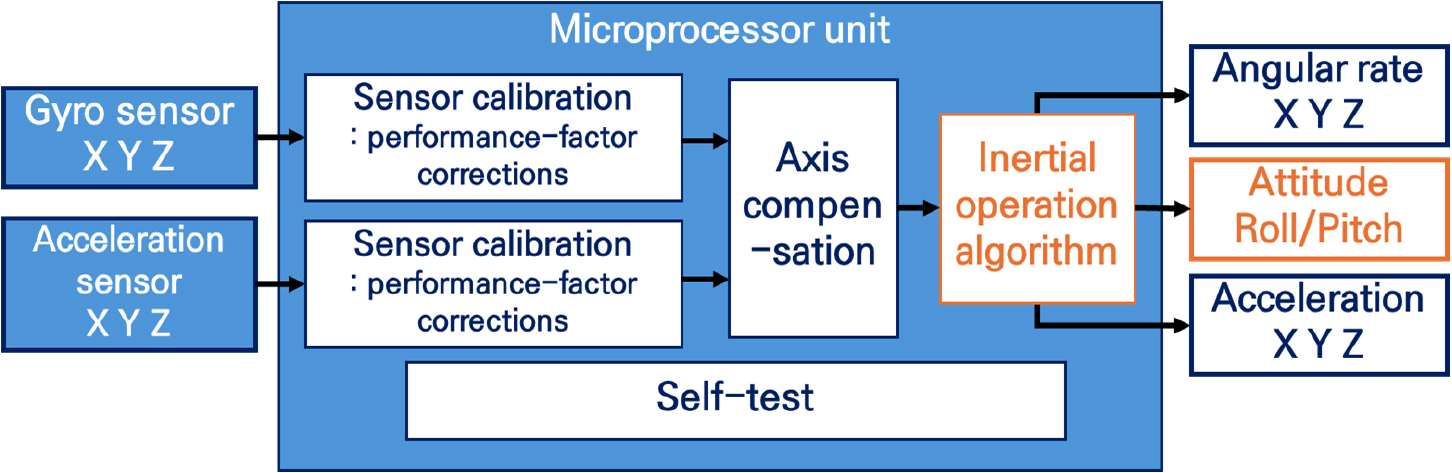
Inertial measurement unit (IMU)는 3축 가속도 센서와 3축 자이로 센서를 기본 구성으로 하는 관성 계측 장치로서 물체의 자세 및 궤적, 운동 상태를 실시간으로 파악하거나 추정할 수 있게 한다(Fig. 1).
도입 초기에는 고가의 대형 장치 형태로 군사·항공·우주 분야에서 관성 항법 시스템(inertial navigation system, INS) 또는 global navigation satellite system (GNSS)와 통합된 항법 시스템에 사용되었다(Groves, 2015). Global positioning system (GPS)가 민간에 개방된 이후, 민간 부문에서도 항법 시스템의 개발 및 상용화가 가능해짐에 따라 이를 구성하는 IMU에 대한 수요와 활용 범위 또한 확대되어 소형화와 저가화에 대한 요구가 강조되었을 것으로 보인다. 특히, 자이로 센서의 소형·저가화는 자동차용 electronic stability program (ESP) 시스템을 확산시켰다. ESP는 도입 초기에 고급 승용차를 대상으로 적용되었으나 센서 단가가 점차 하락하면서 대중 차종에 확대 적용되었다(Perry, 2022; Bosch Mobility, 2025).
이후 센서 기술은 미세전기기계시스템(micro-electromechanical systems, MEMS) 기술의 발전에 따라 전반적으로 고도화되었다. 센서 성능의 향상뿐만 아니라 저비용화·소형화·경량화·저전력화가 가능해지면서 센서의 활용 범위는 더욱 확장되었고 기존의 적용 대상에 대해 한층 더 고도화된 기능을 구현할 수 있게 되었다(Samatas and Pachidis, 2022; Advanced Navigation, 2023).
구체적으로는 생체에 부착할 수 있는 웨어러블 센서 및 드론, 로봇 등이 엔터테인먼트 목적의 일반 소비자용으로 상품화되었다(Johnson, 2010; Robots Guide, 2025). 이를 통해 소비자용 등급의 IMU 및 단일 관성센서가 확대 공급되었고 접근성이 더욱 용이해졌다. 또한, 기존에는 주로 항법 시스템이나 자세 제어 시스템에 활용되었다면, 현재는 다양한 이동체의 자율 주행 시스템, 기계 및 로봇의 작업 자동화 시스템 등 무인화·자동화를 구현하기 위한 연구와 개발이 다양한 분야에서 진행되고 있다(Kayhani et al., 2022; Kurpath et al., 2024).
이와 같이 IMU를 포함한 관성센서의 수요와 공급이 늘어나고 요구 성능에 따른 등급과 가격대가 형성됨으로써 고가의 장비 도입이 어려운 농업에도 관성센서를 적극적으로 활용할 수 있는 환경이 조성되었다. 과거에는 저가형 관성센서의 정확도 한계와 농업 환경에서 요구되는 내구성 부족으로 인해 신뢰성 확보가 어려웠으며, 이로 인해 센서 데이터 기반 기술의 도입과 개발 또한 원활히 이루어 지지 못하였다. 그러나 최근 센서 기술의 발전은 이러한 문제를 현저히 개선하였고, 이에 따라 다양한 이동체에 적용되고 있는 자율주행 시스템을 농업용 차량 및 로봇에 적용할 수 있는 기반이 마련되었다. 가축 관리 분야에 서는 가축의 행동을 관찰하기 위해 웨어러블 센서를 활용함으로써 기존의 노동 집약적인 육안 관찰 방식을 대체하여 실시간 모니터링 및 행동 분석이 가능해졌다. 작물 분야에서는 과실의 진동 수확 효율을 높이기 위한 연구에 관성센서를 활용하고 있으며 향후 기존의 계측 장비이 비해 저비용의 계측 시스템 구축이 가능할 것으로 판단된다. 이와 같이 관성센서의 적극적인 도입은 농업 기술 전반의 발전을 촉진할 것으로 기대된다.
본 연구에서는 IMU 및 단일 관성센서가 농업에 활용된 연구 사례를 조사하고 주요 과제 및 향후의 방향을 논의하고자 하였다. IMU 및 단일 관성센서는 관성센서로 통칭할 수 있으며, 각 연구에 사용된 센서 유형과 활용법에 중점을 두어 분석하고 정리하였다.
Materials and Methods
자료 수집
본 연구는 관성센서를 농업 분야에 활용한 연구 논문을 수집하기 위해 Web of Science에서 다양한 키워드 조합(“imu-agriculture”, “imu-tractor”, “inertial sensor-livestock”, “vibration-fruits” etc.)으로 검색하였으며, 2015년부터 2025년 2월까지 영어로 출판된 SCI급 저널 논문을 대상으로 선정하였다. 관성센서의 사용이 초록에는 언급되었으나 센서의 유형을 알 수 없거나 관련 설명이 없는 논문은 제외하였으며 200편이 넘는 논문 중 30편을 선정하였다.
자료 분류
관성센서의 활용 대상을 기계와 생체로 분류하였다. 이 두 대상은 계측 목적에서 뚜렷한 차이를 보인다. 기계의 경우 위치, 속도, 가속도, 진동 등의 운동 상태를 정량적으로 파악하는 데 중점을 두며, 이를 위해서는 환경적 내구성과 더불어 데이터의 높은 정밀성이 요구된다. 반면, 생체의 경우 운동 패턴과 행동을 비침습적이고 실시간으로 계측하는 것을 목적으로 하므로, 센서의 소형화, 웨어러블화, 에너지 효율성이 강조된다. 기계 분류로는 농업용 차량 및 로봇에 적용한 사례를, 생체 분류로는 가축과 과수에 적용한 사례를 분석하고 정리하였다.
Results
기계 적용 - 농업용 차량 및 로봇
자세각의 정확도 향상
농업용 차량 및 로봇은 상대적으로 저속으로 주행하는 특징이 있다. 이는 인간과의 협업 및 작물 손상 최소화, 고정밀 작업 등 농작업의 기본적인 요구 조건이 그 배경이 되었다고 할 수 있다. 또 다른 특징은 불규칙한 지형을 주행한다는 것, 온실 또는 작물로 인해 GNSS 등의 통신 신호가 차단당하기 쉬운 환경에 놓여있다는 것이다.
Chen 등(2024)은 트랙터와 같이 움직임이 느리고 동적 변화가 적은 차량을 저동적 차량(low-dynamic vehicles)으로 정의하고, 저동적 차량의 자세각(roll, pitch) 추정을 위한 Robust Kalman Filter (RKF)를 설계하였다. 또한, 농기계에서 발생하는 진동과 불균일한 지형 조건에서는 외부 가속도가 자세 추정에 부정적인 영향을 미칠 수 있는 반면, 기존의 자세 추정 모델은 외부 가속도가 무시되어왔다는 것에 문제를 제기하였다. 이를 바탕으로 외부 가속도의 분산 추정을 통해 외부 가속도(외란) 발생 여부를 판단하여 Kalman gain을 동적으로 갱신함으로써 자세의 정확도를 높였다. 트랙터 경운 플랫폼을 사용한 실제 경작지 실험 조건에서, 자체 제작한 IMU와 기준용 고성능 IMU를 쟁기에 부착하여 기존의 Kalman Filter (KF)와 RKF를 기반으로 pitch 값을 추정하고 고성능 IMU의 측정값과 비교한 결과, RKF가 KF에 비해 pitch 값의 RMSE (root mean square error)를 최대 47.5%의 오차 감소 효과를 보였다.
한편, Chen 등(2024)의 연구의 한계점은, 저동적 차량에서는 가속도 변화가 크게 발생하지 않는다는 점이다. Zhang 등(2020)은 이 점에 착안하여 GNSS의 속도 정보를 기반으로 하는 최적화 자세 정렬 알고리즘(velocity-based optimization-based alignment, VBOBA)을 개발하고, GNSS + 저비용 IMU 융합 시스템의 초기 방위각을 정확하고 빠르게 결정할 수 있도록 하였다. 속도 기반 알고리즘 VBOBA와 기존의 가속도 기반 알고리즘(acceleration-based optimization-based alignment, ABOBA)의 시스템 흐름도를 Fig. 2에 나타내었다. 트랙터의 주행 시험 결과, 기존의 가속도 기반 알고리즘보다 방위각 정렬 오차의 표준 편차 및 최대치가 각각 87%, 89% 감소하여 저동적 차량에 효과적임을 검증하였다.
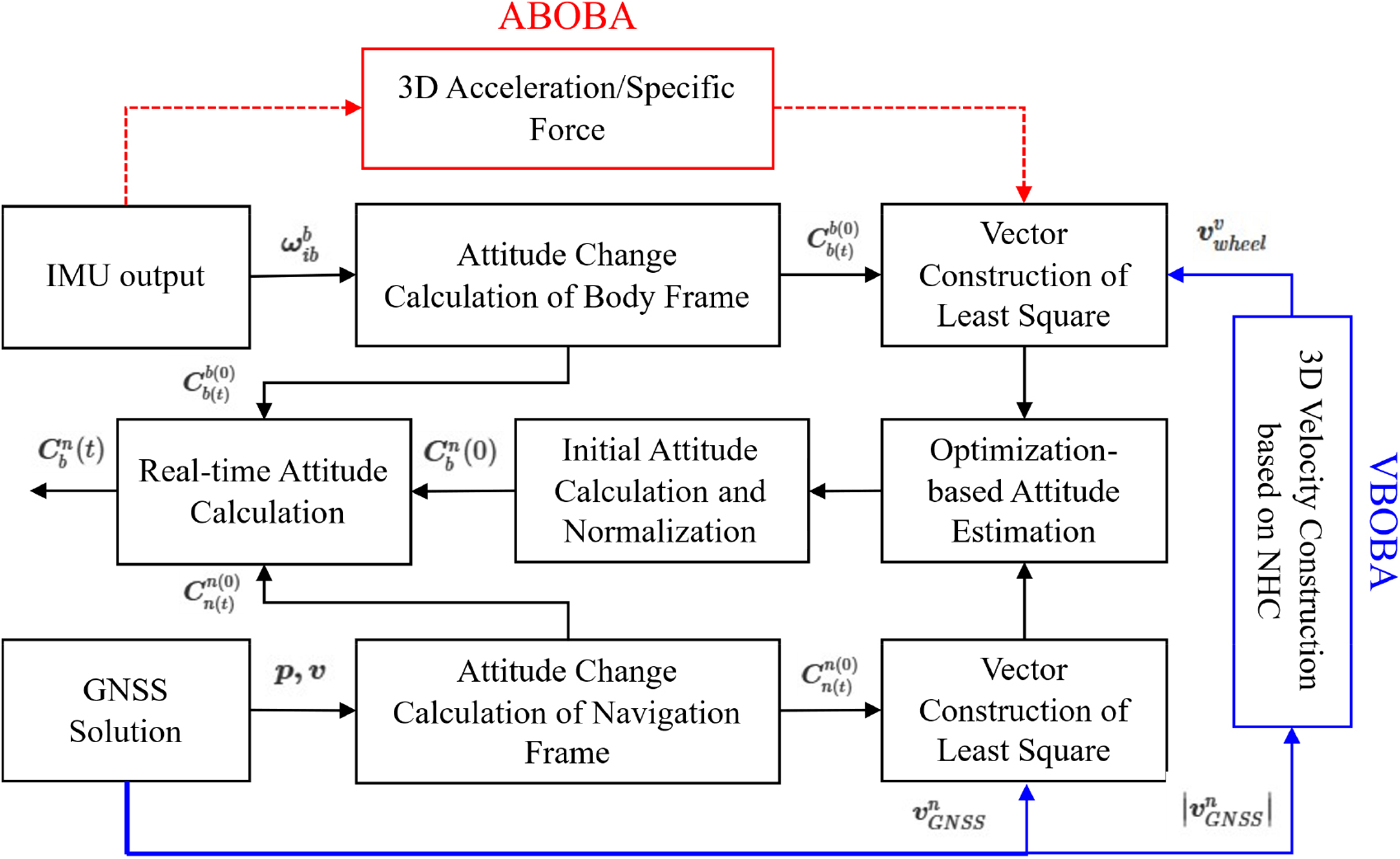
Fig. 2.
Flow diagram of acceleration-based optimization-based alignment (ABOBA) and velocity-based optimization-based alignment (VBOBA). IMU, inertial measurement unit; GNSS, global navigation satellite system; NHC, non-holonomic constraint. Source: Zhang et al. (2020).
Yu 등(2022)은 로터베이터를 사용한 밭의 평탄화 작업의 난이도를 낮추기 위해 트랙터와 작업기의 수평 조절 시스템의 정확도를 향상시키는 제어 알고리즘을 개발하였다. 3점 히치 시스템에 대한 4절 링크 기구의 수학적 모델링을 기반으로 작업기의 운동학적 변화를 계산하여 자세를 예측하는 트랙터 모델을 작성하고 가속도 센서와 자이로 센서의 실측값을 모델의 입력으로 사용하였다. 또한, 모델의 출력값에 KF를 적용하여 노이즈 및 응답 지연을 감소시킴으로 동적 상태의 작업기 roll 값의 정확도를 향상시켰다. 이를 통해, 기울기 센서나 가속도 센서만으로 제어한 기존 시스템과 비교할 때, 히치 위치 변화의 전 구간에서 리프트 로드 실린더의 스트로크 범위 내 작업기 roll 값에 대한 RMSE를 77.63%에서 최대 95.45%까지 감소시킬 수 있었다.
위의 선행 연구들은 자세각의 정확도 향상을 목표로 수행된 알고리즘 개발 사례로, 외부 가속도를 보정하기 위한 KF의 개량, GNSS의 속도 정보를 활용한 자세 정렬 알고리즘 개발, 트랙터의 수학적 모델을 설계하고 이를 KF와 결합하여 트랙터 및 작업기의 자세각을 추정한 연구들을 포함한다. 이러한 접근을 통해 기존의 자세각 추정 기법에 비해 추정 오차를 감소시킨 결과를 도출하였다. 이는 고가의 하드웨어에 의존하지 않고 알고리즘을 통해 센서 성능을 보완하는 방법을 제시함으로써 저비용 센서의 활용 가능성을 확장하였다는 점에서 중요한 의의를 가진다.
GNSS 융합 기반 활용
IMU는 이동체의 자율 주행 시스템에 널리 적용되는 핵심 센서이나, 시스템의 안정성과 정밀도를 확보하기 위해서는 센서 간 상호 보완적 정보를 활용한 다중 센서 융합(sensor fusion)이 필수적이며, 이에 따라 IMU 단독으로 사용되는 경우는 드물다. 특히, GNSS와 IMU는 서로의 단점을 보완할 수 있기 때문에 센서 퓨전 시스템의 핵심적인 구성 요소로 활용되고 있다. GNSS는 위성 신호 의존성이 높아 수신 환경에 따라 성능이 제한되며, 급격한 자세 변화나 세밀한 위치 변화를 정밀하게 감지하기 어렵다는 단점이 있다. 반면, IMU는 절대 위치 정보를 제공할 수 없고, 시간이 경과함에 따라 오차가 누적되는 특성이 있다.
GNSS + IMU 융합 시스템은 위치와 방위각의 오차를 보정하여 농업 로봇의 자동 항법 시스템의 정확성과 안정성을 향상 시킬 수 있으며(Zhang et al., 2022), 논과 같이 불규칙하고 젖은 지형에서 트랙터의 슬립각을 추정하여 경로 추종의 정확성을 향상시키는 데 활용할 수 있다(Han et al., 2019).
Rey 등(2019)은 올리브의 질병 분포를 지도화하기 위해 다양한 센서가 장착된 원격 조종 로봇을 개발하였다. GNSS + IMU + LiDAR (light detection and ranging) + Visual (4종) 융합 맵핑 시스템에서 IMU의 역할은 로봇의 자세 추정 및 GNSS 보간 뿐만 아니라, LiDAR 데이터(좌표)와 LiDAR 위치(로봇 본체 좌표)의 각도 보정을 통하여 좌표계 정렬을 수행하였다. 이를 통해 로봇이 불규칙한 지형을 이동할 때 발생하는 자세 변화가 데이터에 미치는 영향을 최소화하여 3D 위치의 정합도를 향상시키고자 하였고, LiDAR로 생성된 올리브 나무의 수관 모델이 틀어짐 없이 재구성됐음을 확인하였다.
Ke 등(2024)은 저비용 위치 추정 시스템으로 GNSS + IMU + Wheel encoder를 융합하여 예초기의 안정적인 내비게이션을 구현하였다(Fig. 3). IMU의 측정 오차 분산을 억제하기 위하여 Zero-Velocity Update (ZUPT) 전략을 구축하고 주기적 및 비주기적인 IMU 데이터의 업데이트를 통해 누적 오차를 감소시켰다. 또한, Error-State KF를 기반으로 한 GNSS와의 통합 및 상보 필터를 이용한 wheel encoder와의 센서 융합을 통해 저비용 센서의 누적 오차 한계를 보완하였으며, 평균 오차는 0.15 m 이하, 최대 오차는 0.3 m를 달성하였다.
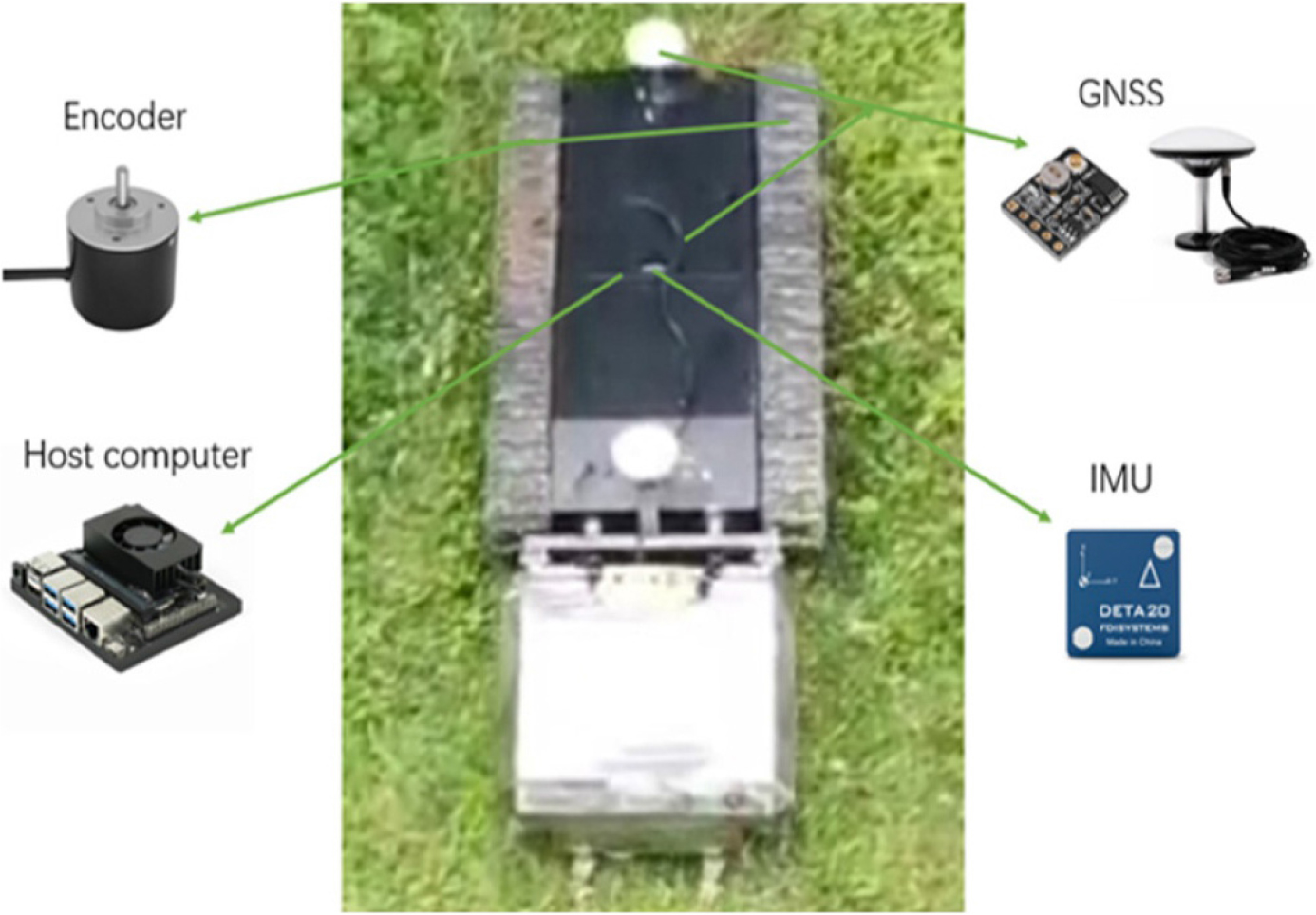
Fig. 3.
Mower and sensors. GNSS, global navigation satellite system; IMU, inertial measurement unit. Source: Ke et al. (2024).
이와 같이 위치 추정, 경로 추종 및 맵핑 시스템에서는 GNSS와의 융합이 일반적인 접근 방식이며, 추가적인 센서 융합을 통해 시스템의 안정성과 정밀도를 더욱 향상시킬 수 있다. 본 항에서 검토한 선행 연구들은 불규칙한 지형, 측면 미끄러짐, 진동 등과 같은 복잡한 농업 환경의 제약 요인을 인식하고 이를 극복함으로써 시스템의 정확도와 신뢰성을 확보하는 데 중점을 두고 있다. 또한, 고가 장비에 대한 의존도를 낮추기 위해 단일 센서의 한계를 보완할 수 있는 데이터 처리 및 센서 융합 알고리즘을 개발하였으며, 이를 통해 저비용 센서의 활용 가능성을 실증적으로 제시하였다.
GNSS 비의존 기반 활용
대부분의 이동체는 위치 정보를 필요로 하기 때문에 GNSS의 의존도가 높으나, 앞서 언급한 대로 농업 현장은 다양한 전파 차단 요소로 인해 통신이 불안정한 환경 특성을 갖는다. GNSS 신호가 불안정한 환경에서는 위치 및 속도 정보를 제공하는 GNSS의 본래 기능이 제대로 수행되지 않아, 시스템의 성능과 안정성에 심각한 영향을 초래하기 때문에 GNSS를 대체하여 위치 및 속도 정보를 획득할 수 있는 기법에 대한 연구가 필수적이다.
Yan 등(2022)은 GNSS가 차단된 온실 환경에서 로봇의 정확하고 견고한 자세 추정 및 위치 추정을 목표로 Extended Kalman Filter (EKF) 기반 IMU + Visual (2종) + Wheel encoder 융합 기법을 제안하였다(Fig. 4).
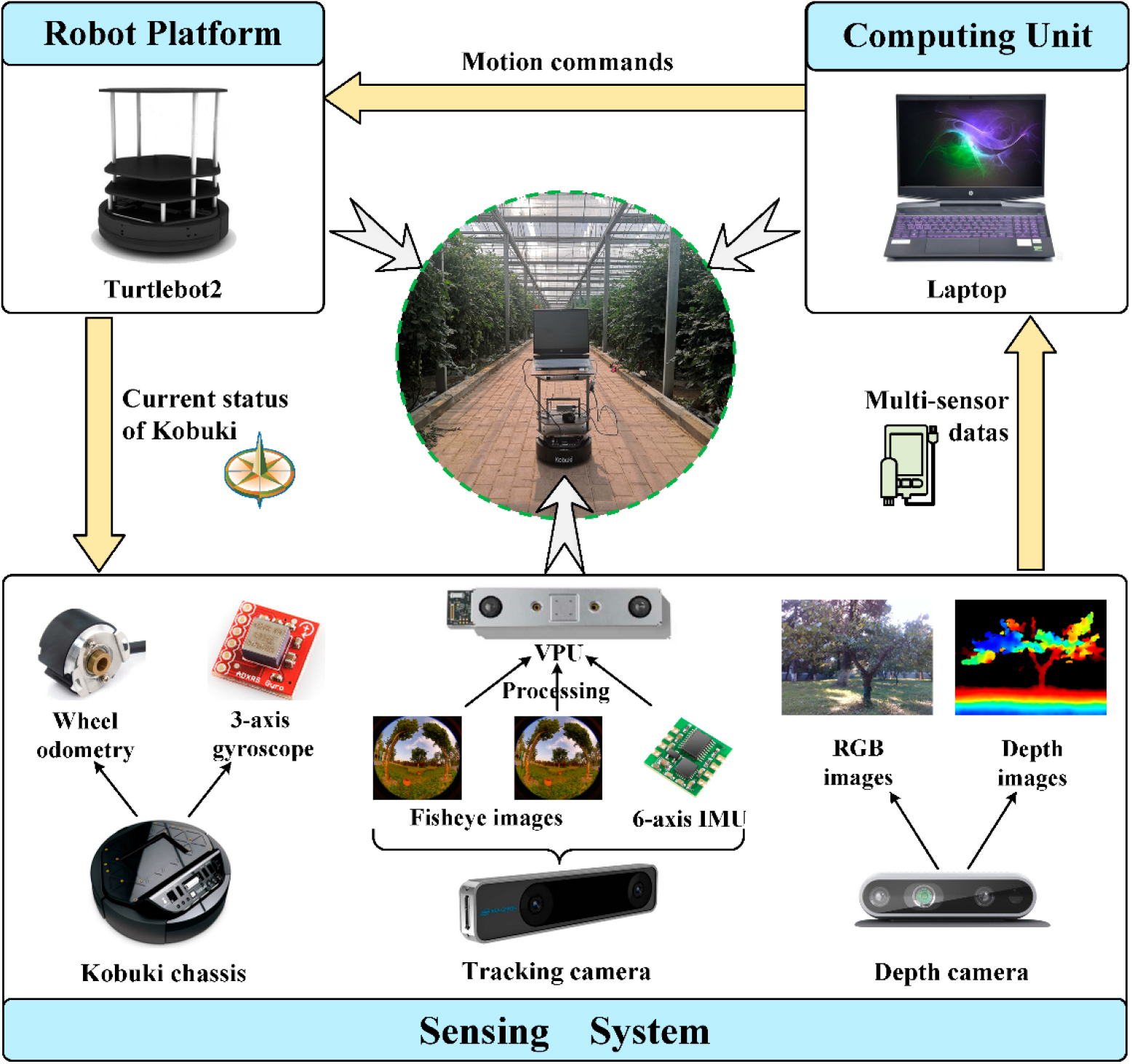
Fig. 4.
The hardware platform of the proposed real-time localization and mapping. VPU, visual processing unit; IMU, inertial measurement unit. Source: Yan et al. (2022).
각 센서의 측정치를 EKF로 결합한 다중 센서 융합 알고리즘은 상용 Visual-Inertial Odometry (VIO)를 단독으로 사용하는 것 보다 위치 추정 정확도가 향상되었다. 온실 교차로 실험 결과, 다중 센서 융합 알고리즘의 위치 추정 RMSE는 0.023으로, VIO의 0.564에 비해 현저히 낮은 값을 나타냈다. 또한, 연못가 야외 실험에서는 VIO가 카메라의 반사 영역에서 특징점 부족으로 인해 다수의 위치 추정 오류를 보였고, 이로 인해 RMSE가 5.714에 달하였다. 이에 비해 다중 센서 융합 알고리즘은 RMSE가 0.583으로 성능 차이가 뚜렷하게 확인되었다.
Liu 등(2022)은 과수원을 자율 주행하는 농약 살포 로봇(precision variable-rate spraying robot, PVSR)을 개발하였다. GNSS 신호가 차단되기 쉬운 과수원에서는 GNSS에 의존하지 않는 시스템의 필요성을 강조하며 3D-LiDAR + IMU + Wheel encoder 융합 시스템으로 자율 주행과 정밀 가변 살포를 동시에 수행하는 궤도형 로봇을 제안하였다. IMU는 KF 기반의 자세 추정을 통하여 PVSR의 코스 각도 및 위치 정보를 수집하고 LiDAR 기반 중앙선(과수열 사이의 평균 위치를 잇는 가상의 직선 경로) 추출 알고리즘에 통합되어 주행 정확도를 향상시키는 역할을 하였다. 성능 비교용 GNSS로 얻은 궤적을 기준으로 횡방향 편차는 최대 22 cm, 주행 각도 편차 최대 4.02°의 결과를 얻었고 실험 환경에서 충돌 없이 안정 주행이 가능함을 확인하였다. 또한, LiDAR 데이터의 좌표계 정렬 및 yaw 값을 기반으로 한 회전 판정을 수행하는 데 IMU를 활용하였다.
위의 선행 연구들은 농업 환경의 특성상 발생하는 위성 신호의 손실 및 단절 현상을 주요한 기술적 과제로 인식하고 이를 극복하기 위한 대안을 제시하였다. VIO 및 3D-LiDAR 기반 위치 및 경로 추정 시스템은 GNSS에 비의존적인 특성을 지니므로 GNSS 신호가 불안정한 농업 현장에 유효한 대안으로 간주된다. 다만, Liu 등(2022)의 결과는 GNSS를 사용하지 않았을 때의 궤적이 GNSS의 궤적과 10 cm 이상의 오차를 보임을 나타내며, 이는 위치 추정 정확도 측면에서는 GNSS를 완전히 대체할 수 있는 수준에는 도달하지 못한 것으로 평가된다. 따라서, 정확도의 향상 및 비용 효율성 제고를 위한 후속 연구가 지속적으로 요구된다.
Table 1에 기계에 적용한 관성센서의 유형과 활용 목적을 정리하였다.
Table 1.
Sensor types and analytical models applied to agricultural machinery.
| Purpose | Sensor types | Mounting locations | Application models | References |
|
Improvement of attitude angle accuracy | IMU (6-axis) | Plow implement | Robust KF | Chen et al. (2024) |
| GNSS + IMU (6-axis) |
Tractor (specific position not mentioned) |
- VBOBA - ABOBA | Zhang et al. (2022) | |
| IMU (6-axis), MEMS accelerometer (3-axis) |
Upper section of the tractor’s transmission housing, Upper part of the implement |
- KF - Complementary filter | Yu et al. (2022) | |
|
GNSS + IMU (6-axis) + Load cell | Lower center of the picking cart | Tilt angle calculation | Anjom et al. (2018) | |
|
Path tracking, position and attitude estimation | GNSS + IMU (6-axis) | Beside the driver’s seat |
- Slip estimation-based path-tracking control algorithm - Observer-based estimation of sideslip angles | Han et al. (2019) |
|
GNSS + IMU (9-axis) + Wheel encoder | Center of the mower |
- Error-State KF - Complementary filter | Ke et al. (2024) | |
|
GNSS + IMU (9-axis) + LiDAR + Visual |
Robot (specific position not mentioned) | Attitude and displacement correction | Rey et al. (2019) | |
|
GNSS + IMU (9-axis) + Wheel encoder | Robot chassis | Error-State KF | Zhang et al. (2022) | |
|
3D-LiDAR + IMU (9-axis) + Wheel encoder | Lower chassis of the robot |
- KF - Kinematic model for position and yaw angle | Liu et al. (2022) | |
|
IMU (6-axis) + Visual + Wheel encoder | Top of the robot platform |
- Extended KF - State estimation model | Yan et al. (2022) |
검토된 선행 연구들을 바탕으로 할 때, 농업용 차량 및 로봇에는 모두 IMU의 형태로 관성센서가 활용되었다. 자세 추정의 정밀도를 높이기 위한 알고리즘을 개발하여 저비용 관성센서의 한계를 보완한 연구와 자율주행을 위한 센서 퓨전 시스템의 핵심 요소로 활용한 연구가 주류를 이루고 있음을 알 수 있다. 한편, 관성센서는 기계의 무게 중심 부근 또는 계측 대상의 평탄한 면에 부착되었다. 일반적으로 관성센서는 계측 대상 좌표계의 기준점에 설치하며, 이동체의 경우 설계상의 중심점을 기준으로 하여 원심력 등 외부 가속도의 영향을 최소화하도록 한다. 또한 좌표계의 기준을 조인트와 같은 가동 부위로 설정할 경우 관성센서의 직접 설치가 어려우므로 기준점으로부터 관성센서까지의 위치 정보를 활용하여 외부 가속도를 보정하는 알고리즘에 적용할 수 있다. 자세각 추정 및 센서 융합을 위해 적용된 모델 가운데 절반 이상은 KF 또는 KF 기반의 알고리즘이었으며, 이 외에도 연구 목적에 맞추어 설계된 알고리즘이 다양한 방식으로 적용되었다.
생체 적용 - 가축
행동 인식 및 분류
기존의 가축의 행동 모니터링은 육안 관찰이나 비디오 분석을 통한 방식이었으나 이는 노동 집약적이며 가축에게 스트레스를 줄 수 있다는 문제점이 있었다. 센서의 저비용화·소형화·경량화로 웨어러블 및 일반 소비자용 제품의 상용화가 실현됨으로써 가축의 신체 부위에 관성센서를 부착하여 가축의 활동을 모니터링 하거나 신체 부위의 움직임을 계측할 수 있게 되었다.
Andriamandroso 등(2017)은 정밀 축산(precision livestock farming, PLF)에 있어서 가축의 행동을 모니터링 하기 위한 공유 가능하고 유연한 플랫폼의 필요성을 강조하였다. 해당 연구에서는 방목 소의 초목 섭취 및 반추 행동 감지를 위해 iPhone 4S를 목걸이형으로 부착하여 내장된 IMU로 머리와 턱의 움직임을 계측하였다(Fig. 5). 행동 분류는 Decision Tree를 기반으로 2단계 트리 구조를 설계 및 적용하였고, 영상 기반 행동 분류와 비교 검증하였다. 그 결과, F1 Score (정밀도와 재현율을 고려한 지표) 기준 섭취 행동 분류 성능은 91.4%, 반추 행동 분류 성능은 95.5%를 달성하였다. 해당 연구에서 사용한 알고리즘은 오픈 소스로 공개되었으며, 하드웨어로는 접근성이 높은 스마트폰을 사용함으로써 쉽게 공유 가능하고 유연한 플랫폼을 제시하였다.
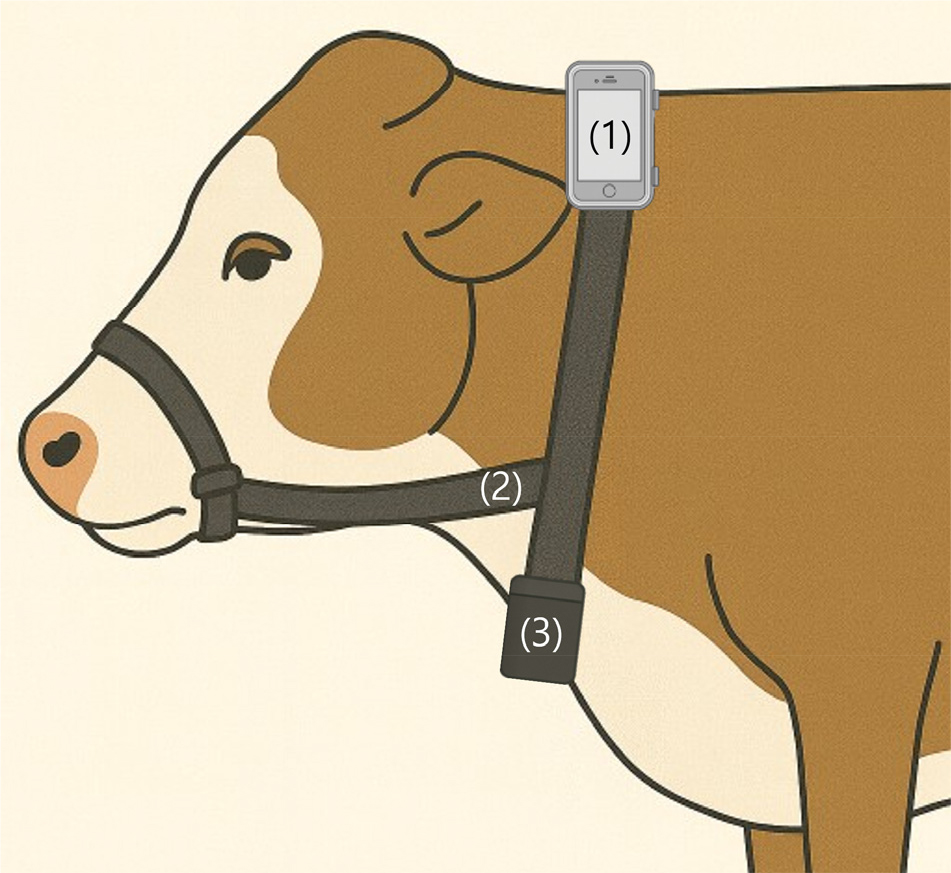
Fig. 5.
Image for device configuration description. All equipment components including the iPhone box (1), the halter (2), and the supplementary battery (3). Source: Andriamandroso et al. (2017).
이 외에도, 소의 목에 IMU를 부착하고 해당 데이터를 활용하여 행동 인식 및 분류를 수행한 사례로는 Wu 등(2022), Liu 등(2023), Muñoz-Poblete 등(2024)의 연구가 보고된 바 있다. Wu 등(2022)은 소의 피부질환과 관련된 6가지 행동을 분류하기 위해, 시계열 데이터 처리에 효과적인 장단기 메모리(long short-term memory, LSTM) 구조를 기반으로 성능을 개선한 Deep Residual Bidirectional LSTM을 제안하였으며, 행동 분류에서 F1 Score 기준 94.9%의 높은 성능을 달성하였다. Liu 등(2023)은 행동 분류 시스템의 경량화를 목적으로 LSTM 보다 구조가 단순하고 연산이 적은 Fully Convolutional Network (FCN) 기반 모델을 사용하여 시스템의 연산 처리를 경량화하고, F1 Score 기준 83%의 성능을 확보하였다. Muñoz-Poblete 등(2024)은 소의 행동 인식 정확도를 향상시키기 위해 IMU의 자세 오차를 자체적으로 보정할 수 있는 Quaternion Kalman Filter (QKF) 기반 알고리즘을 설계하여 데이터의 신뢰도 향상을 도모하였고, 저비용 IMU 2종에 대한 보정 성능을 평가하여 저비용 IMU에 대한 적용 가능성을 확인하였다.
Russel과 Selvaraj (2024)는 공개된 데이터셋을 활용한 사례로, 소의 행동 분류를 위해 Convolutional Neural Network (CNN) 기반의 딥러닝 모델을 제안하였다. 이 모델을 다음 세 가지 데이터 셋 (1)다리에 부착한 가속도 센서 데이터셋, (2)몸통에 부착한 IMU 데이터셋, (3)목에 부착한 가속도 센서 데이터셋에 적용한 결과, F1 Score 기준으로 다리 부착 데이터가 98.5%, 몸통 부착 데이터가 75.8%, 목 부위 부착 데이터가 99.0%의 분류 성능을 나타냈다. 이는 센서의 부착 위치가 행동 분류 성능에 영향을 미치며 소의 경우, 상대적으로 움직임이 제한적인 몸통 부위는 행동 분류에 적합하지 않음을 시사한다.
이러한 가축의 행동 및 활동 인식에 사용된 센서 유형과 분석 모델을 Table 2에 정리하였다. 소 외에도 산란계의 시공간적 행동 분석(Shimmura et al., 2024) (Fig. 6)과 활동 강도 분류(Shahbazi et al., 2023), 염소의 분만 행동 탐지(Goncalves et al., 2024)에서도 관성센서가 활용된 바 있다.
Table 2.
Sensor types and analytical models used for livestock behavior and activity recognition.
|
Purpose (target behavior / task) | Sensor types |
Mounting locations | Analytical models | References |
| Detect grazing and rumination in cattle | IMU, 6-axis (iPhone 4S) | Cattle’s neck |
Decision tree (one- or two-step) | Andriamandroso et al. (2017) |
| Detect skin-disease-related scratching / rubbing in cattle | IMU, 9-axis | Cattle’s neck |
LSTM-based deep learning | Wu et al. (2022) |
| Classify seven cattle behaviors | IMU, 9-axis | Cattle’s neck | FCN | Liu et al. (2023) |
| Classify activity intensity (low, medium, high) in laying hens | IMU, 6-axis | Chicken’s back | CNN-based deep learning | Shahbazi et al. (2023) |
| Detecting goat parturition activity |
IMU, 6-axis + Ultrasound sensor | Goat’s neck | Random forest, Decision tree, k-NN | Goncalves et al. (2024) |
| Early detection of abnormal behavior in dairy cows |
- IMU, 6-axis - MEMS accelerometer, 3-axis |
Cattle’s neck, leg, torso |
CNN-based deep learning | Russel and Selvaraj (2024) |
| Automatically recognize chicken behavior | IMU, 6-axis | Chicken’s back |
Supervised machine learning | Shimmura et al. (2024) |

가축에 적용한 관성센서는 대부분 웨어러블 IMU이었으며 상용 웨어러블 센서의 형태는 Fig. 7과 같다. 센서의 크기를 고려하여 센서의 부착 위치는 가축의 크기에 따라 상이한 것으로 판단된다. 소 및 염소의 경우에는 센서를 목에 착용하는 목걸이 형태의 장착 방식이 주로 사용되었고, 닭의 경우에는 등에 백팩 형태의 장착 방식이 채용되었다. 특히, 소와 염소는 일상적으로 고삐나 목줄을 착용하는 경우가 많기 때문에 목걸이 형태의 부착이 가축의 행동학적 스트레스를 최소화하는 데 유리할 것으로 판단된다. 이와 관련하여, 가축에 센서를 부착하여 행동 데이터를 수집할 경우, 장치 착용으로 인한 불편함이 이상 행동을 유발하지 않도록 충분한 적응 시간을 부여하는 것이 필요하다. 한편, 행동 및 활동 인식을 위한 데이터 분석에는 CNN, LSTM 등 딥 러닝 기반 모델의 활용이 주를 이루었으며, 그 다음으로는 Random Forest, Decision Tree와 같은 머신 러닝 기법이 활용되었다.
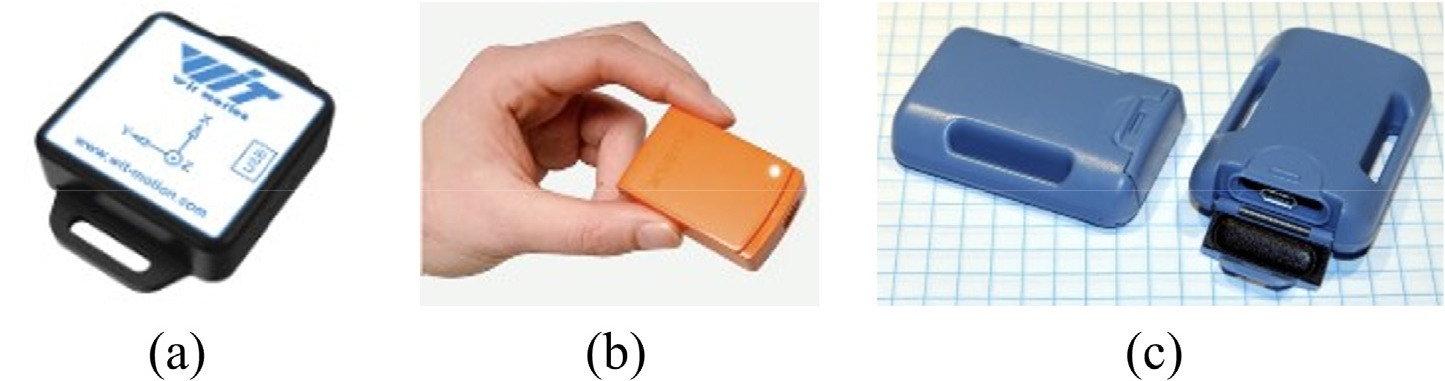
Fig. 7.
Wearable inertial measurement unit (IMU). (a) WT901SDCL (WitMotion, 2025), (b) MTw2 Awinda (Movella, 2025), and (c) HAM-IMU (Gulf Coast Data Concepts, 2024).
보행 분석
정밀한 보행 분석에는 모션 캡쳐 시스템, 힘판(force plate), 압력 매트 등의 장비가 활용될 수 있으나, 이들 장비는 실험실 고정형 장비이거나 장애물 및 외부 간섭 요소가 없는 통제된 환경에서만 계측의 정밀도와 재현성이 확보된다. 따라서, 환경 변동성이 크고 장비에 대한 물리적 내구성이 요구되는 가축 사육장과 같은 현장에서는 적용에 제한이 있을 것으로 판단된다.
Fischer 등(2022)은 콘크리트와 고무 매트 바닥에서 젖소가 걷거나 빠르게 걷는 보행 패턴을 비교 분석하기 위해 IMU를 뒷다리 중족부에 벨크로로 고정시키고 스텝 감지 및 체중지지 비율, 자이로 변화량 등을 매개변수로써 계측하였다. 통계 분석 결과, 보행 유형이 모든 매개변수에 유의한 영향을 미치며 IMU가 보행의 세부 동작 구분 및 지면 초기 접촉 감지에 효과적임을 확인하였다. 해당 연구에서는 웨어러블 압력 센서도 함께 사용되었으며 향후 과제로 압력 센서와 IMU를 통합한 시스템의 개발 가능성을 제시하였다.
웨어러블 센싱 시스템은 앞서 언급한 환경적 제약의 영향을 받지 않으며, 우수한 현장 적용성과 비용 효율성을 갖춘 기술로 평가된다. 이러한 특성은 축사 환경 개선 및 가축 질병 예방을 위한 유효한 수단으로 활용될 수 있음을 시사한다.
동작 감지 기반 에너지 효율화 전략
Ojo 등(2022)은 광범위한 방목 환경에서 양의 위치를 실시간으로 모니터링하기 위해 GNSS, Long Range Wide-Area Network (LoRaWAN), IMU, 클라우드 기술을 통합한 시스템을 제안하였다. 배터리 교체가 어려운 넓은 방목 환경에서의 사용을 고려하여 에너지 효율성과 통신 안정성의 균형이 중요함을 강조하고 이를 반영한 저전력 웨어러블 단말기를 자체 개발하였다. 웨어러블 단말기는 초저전력 microcontroller unit (MCU), GNSS 및 LoRa 모듈, IMU로 구성되었으며 목걸이형으로 제작되어 양의 목에 부착되었다. IMU는 양의 움직임을 감지하여 GNSS 및 LoRa 모듈의 동작 여부를 제어하는 트리거 역할을 수행하며, 양이 자고 있거나 앉아 있는 등의 정지 상태로 판단되면 통신 모듈을 슬립 모드로 전환하여 에너지 소비를 최소화하도록 설계되었다. IMU 기반의 동작 감지에 따른 통신 전력의 제어 전략은 단말기의 전력 소비를 크게 줄였으며 실험 결과 배터리 지속 시간이 슬립 모드 미사용 시에 비해 40% 이상 증가하였고 배터리가 방전될 때까지 최대 14일간 작동함을 확인하였다.
해당 연구는 기존의 자세 및 위치 추정 중심의 관성센서 활용 방식과는 달리, 에너지 효율성 향상을 위한 시스템 설계 요소로 활용하였다는 점에서 실질적인 기여점을 가진다. 웨어러블 또는 무선 센싱 시스템의 핵심 과제 중 하나는 충분한 배터리 구동 시간을 확보하기 위한 저전력 설계 및 에너지 최적화이며, 해당 연구는 이에 대한 응용 가능성을 실증하였다고 볼 수 있다.
진동 계측 기반 스트레스 분석
Cui 등(2019)은 양의 운송 중 스트레스로 인한 폐사율 증가 및 육질 저하 문제에 대응하기 위해 웨어러블 스트레스 모니터링 시스템을 제안하였다. 하드웨어는 마스터 유닛과 슬레이브 유닛으로 구성되었으며, 마스터 유닛은 마스터 MCU, GNSS 모듈, 가속도 센서, 온습도 센서로 이루어져 환경 데이터를 수집하는 역할을 수행하였다. 슬레이브 유닛은 슬레이브 MCU, 심박수 센서, 피부 온도 센서로 구성되어 생체 데이터를 계측하고 이를 마스터 유닛으로 전송하는 기능을 수행하였다. 슬레이브 유닛은 심박수 계측이 용이한 목에 부착되었으며, 대용량 배터리를 탑재한 마스터 유닛은 비교적 무거운 무게로 인해 양의 등에 부착되었다(Fig. 8). 마스터 유닛은 28,000 mAh 용량의 배터리를 사용하였으며, 약 20시간 동안 안정적으로 구동되었다. 슬레이브 유닛은 2,000 mAh 용량으로 16시간 동안 구동이 가능하였다.
가속도 센서는 운송 중 발생하는 진동을 정량적으로 계측하는 역할을 하며, 이러한 진동 데이터는 생체 데이터 기반의 생리적 스트레스 반응(heart rate variability, HRV)과의 상관관계 또는 인과관계를 분석하는 데 활용되었다. 결과적으로 운송 시간이 길어질수록 생리적 스트레스 반응이 누적되는 경향을 통계 분석을 통해 확인할 수 있었으며, 이는 진동 저감 및 운송 시간 단축 등의 운송 환경 개선을 위한 근거 자료로 활용 가능함을 시사하였다.
해당 연구에서는 운송 중 발생하는 진동을 계측함에 있어, 트럭의 짐칸이 아닌 가축의 몸통에 가속도 센서를 부착하여 가축이 실제로 체감하는 진동을 직접 계측하는 방식을 도입했다는 점에서 일반적인 활용 방식과 차별성을 지닌다.
그러나 운송 중 발생하는 진동 저감을 위해서는 운송 수단에서 발생하는 진동 데이터를 동시에 수집하는 과정이 병행되어야 하며, 가축의 스트레스 반응을 고려한 진동의 허용 한계 설정 등 체계적인 기준 마련을 위한 후속 연구가 필요하다.
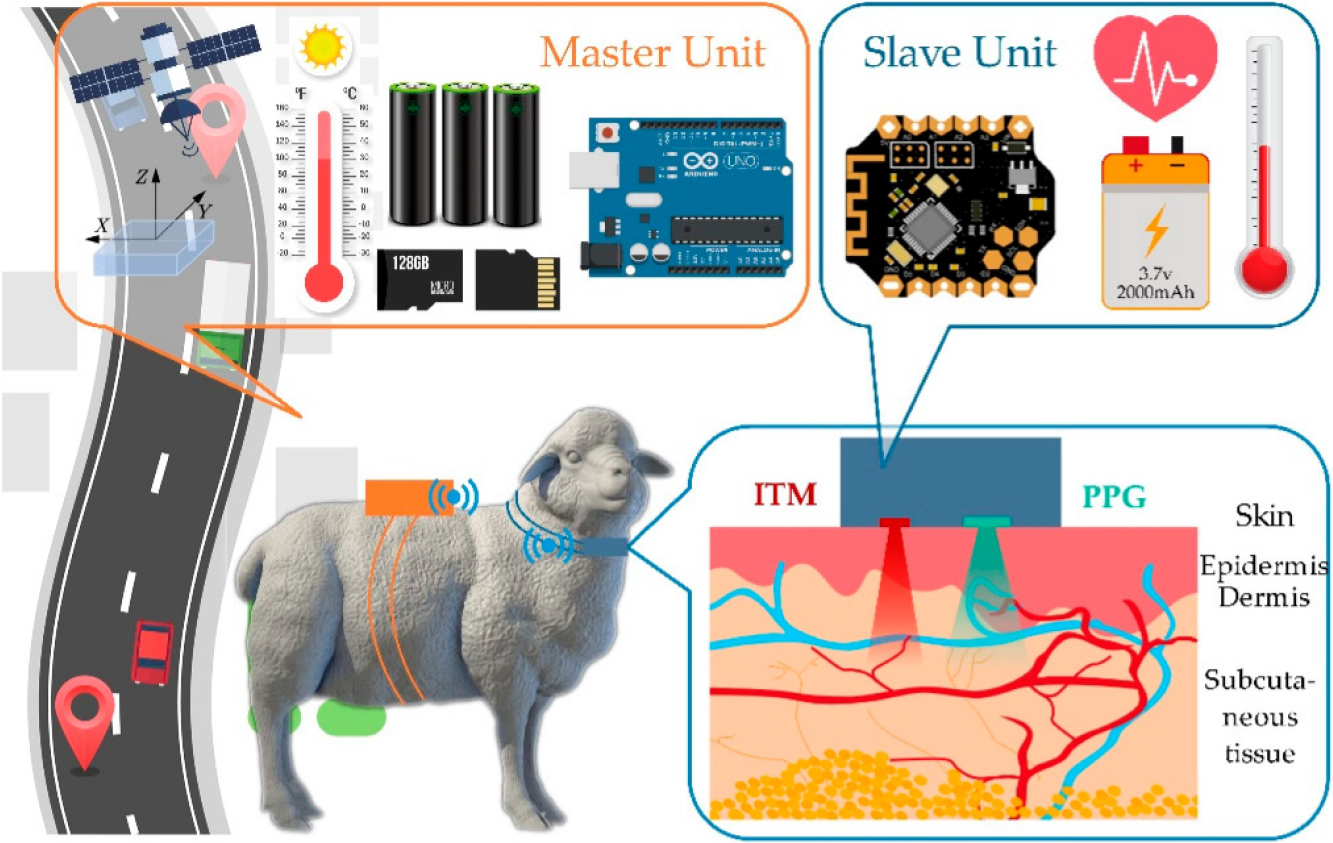
Fig. 8.
The wearable stress monitoring system (WSMS) architecture based on multi-sensor platform. Source: Cui et al. (2019).
관성센서를 활용한 가축 관련 연구는 주로 행동 인식 및 분류에 초점을 맞추고 있다. 관성센서를 활용한 가축의 행동 모니터링은 기존의 육안 관찰 방식의 비효율성과 주관성, 오류 가능성 등의 문제점을 보완할 수 있을 것이며, 가축의 건강 상태 및 생산성과 관련된 유의미한 정보를 효과적으로 수집하여 정량적 관리와 복지 수준 향상에 기여할 것으로 기대된다. 한편, 가축의 동작 여부를 감지하여 통신 모듈의 전력을 제어하는 트리거 역할로 센서를 활용한 사례는 기존의 정밀 계측 중심 접근에 비해 보다 창의적인 응용 방식으로 평가되며, 이는 배터리 구동 시간 확보를 위한 저전력 시스템 설계의 중요성을 시사한다. 실제로 웨어러블 센싱 시스템의 배터리 수명은 현장 적용에 있어 핵심적인 제약 요인으로 작용하므로, 효율적인 전력 관리 및 저전력 설계에 대한 기술적 고려가 필수적이다.
생체 적용 - 과수
수목은 자발적인 움직임이 없는 정적 객체로 간주되어 관성센서 적용 연구의 우선순위가 낮게 평가될 수 있다. 그러나 수목은 외부 환경적 요인에 의해 진동 및 요동하는 동적 특성을 지닌다. 이러한 수목의 동적 거동은 태풍 및 지진과 같은 극심한 자연현상뿐만 아니라, 바람, 강수, 적설 등과 같은 일상적인 기상 요인 및 수확 과정에서 발생하는 인위적인 기계적 진동에 의해서도 유발된다. 수목의 동적 거동을 규명하는 연구는 임업 분야에서 활발히 진행되고 있으며, 가속도 센서나 기울기 센서를 수목에 부착하여 바람, 중력, 적설 하중 등에 따른 물리적 반응을 계측 및 분석하는 시도가 지속적으로 이루어지고 있다(Schindler and Mohr, 2018; Jackson et al., 2021). 한편, 농업 분야에서는 과실 수확의 효율성 제고를 위해, 셰이커(진동 수확기)의 성능 최적화를 목적으로 과수의 진동 반응 및 진동 전달 특성을 분석을 하는 데 가속도 센서 기반 계측이 활용되고 있다.
셰이커는 진동 부여 위치에 따라 트렁크 셰이커, 브랜치 셰이커, 캐노피 셰이커로 구분된다. 트렁크 셰이커와 브랜치 셰이커는 각각 줄기 또는 가지에 셰이커를 직접 고정하여 진동을 전달하며, 캐노피 셰이커는 수관 내부에 복수의 막대를 삽입한 후, 막대의 직선 또는 회전 운동을 통해 다수의 가지에 진동을 부여하는 방식이다. 장비의 규모 측면에서, 트렁크 셰이커와 캐노피 셰이커는 트랙터 장착형 대형 기종이 주를 이루며, 브랜치 셰이커는 소형 포터블형 장비로도 활용된다. 이처럼 셰이커는 진동 방식과 구조적 형태에 따라 작동 메커니즘과 적용 조건이 상이하여, 효과적인 진동 전달 및 수확 효율 향상을 위한 정량적 분석이 요구된다.
본 절에서는 관성센서를 활용하여 가지와 과실에 전달되는 진동 특성의 계측 및 전달 모델링을 통해 수확 효율을 향상시키고자 한 연구들을 고찰한다.
가지에 전달되는 진동 특성 분석
Castro-Garcia 등(2019)은 캐노피 셰이커의 막대가 직접 접촉하지 않는 내부 캐노피 영역에서의 과일 수확 효율 편차에 대한 문제를 해결하고자, 감귤나무의 가지별 진동 모니터링 데이터를 기반으로 진동 매개변수의 최적화 조건을 제안하였다. 진동 데이터는 90개의 착과 가지에 가속도 센서를 부착하여 계측하였고, 각 가지에는 평균 3.8개의 과실이 달려 있었다. 분석에 사용된 주요 진동 지표는 진동 시간, 평균 피크 가속도, 주파수, RMS (root mean square) 가속도였으며, 계측 결과, 외부 캐노피 영역의 가지는 셰이커 막대와의 직접 접촉으로 인해, 내부 캐노피 영역의 가지보다 평균 RMS 가속도 값(각각 29.6 ± 10.2 m·s-2 및 12.8 ± 6.4 m·s-2)과 평균 탈과율(각각 84.7% 및 25.1%)이 높게 나타났다. 탈과율 100%를 달성하기 위한 조건을 식별하기 위해 로지스틱 회귀 분석을 수행한 결과, RMS 가속도와 진동 시간의 조합이 탈과에 중요한 변수임을 확인하고 최소 5.8 s의 진동 시간과 23.9 m·s-2의 RMS 가속도 조합을 제안하였다. 해당 연구는 캐노피 내부와 외부 영역의 진동 가속도 및 탈과율 차이를 정량적으로 분석하여 캐노피 셰이커의 개선 방향을 제시했으며, 다수의 가속도 센서에서 획득한 데이터 분석을 통해 완전 탈과를 위한 진동 시간과 RMS 가속도 조합의 임계치를 명확히 제시함으로써 현장에 적용 가능한 기준을 마련하였다.
Sola-Guirado 등(2016)의 연구에서는 올리브 수확용 캐노피 셰이커의 진폭, 주파수, 셰이커의 막대 밀도, 주행 속도 네 가지 작동 변수의 변화가 과실 탈과 효율과 수목 손상에 미치는 영향을 체계적으로 평가하였다. 진동 특성 분석을 위해 과실이 부착된 가지에 압전식 가속도 센서(Fig. 9)를 설치하고 계측한 결과, 과실 탈과 효율을 결정짓는 주요 인자는 진폭과 주파수로 나타났으며, 진폭 또는 주파수를 개별적으로 증가시킬 경우 기본 작동 조건 대비 탈과 효율이 15% 이상 향상되었다. 반면, 막대 밀도의 증가는 탈과 효율에 유의한 영향을 미치지 못했으나, 수목 손상을 크게 증가시키는 유일한 요인으로 나타나 막대와 캐노피 간 직접 접촉만으로는 과실 분리에 한계가 있음을 시사하였다. 해당 연구에서는 가속도 센서를 이용해 가지에 전달되는 진동 특성을 정밀 분석함으로써 수목의 물리적 특성에 최적화된 셰이커의 작동 변수를 도출하고, 탈과 효율과 수목 손상 간의 트레이드오프 관계를 정량적으로 규명하였다. 이때 사용된 압전식 가속도 센서는 별도의 데이터 로거와 연동하여 수 Hz에서 수십 kHz에 이르는 광대역 주파수 신호를 고속 샘플링 및 높은 분해능으로 정밀 계측할 수 있다. 다만, 이러한 고성능 고정식 계측 장비는 높은 도입 비용과 설치·운용의 제약으로 현장 적용에 어려움이 따른다.

Fig. 9.
Piezoelectric acceleration sensors. (a) 356A26 (PCB Piezotronics, 2025b) and (b) 356A16 (PCB Piezotronics, 2025a).
선행 연구들은 캐노피 셰이커 시스템의 성능을 개선하고자, 가지에 가속도 센서를 부착하여 진동 가속도를 계측하고, 진동 매개변수 및 기계 매개변수가 수확 효율 및 수목 손상에 미치는 영향을 분석하였다. 특히, 진동 가속도에 대한 통계적 분석을 통해 셰이커의 최적 운용 조건을 정량적으로 제시하였다는 점에서 의의가 있다. 아울러, 수형 구조가 수확 효율에 영향을 미치는 요소임을 보고하였으며, 이는 효율적인 수확을 위해 수형 관리가 필수적임을 시사한다.
과실에 전달되는 진동 특성 분석
Liu 등(2018)은 감귤 수확용 캐노피 셰이커의 최적화 설계를 위해 재질 또는 형태가 다른 4가지 타입의 막대를 비교하여 탈과율 및 수목의 손상 정도를 평가하였다. 과실과 과실에서 줄기를 따라 뻗은 가지 세 지점에 부착된 가속도 센서를 통해 진동 가속도를 정밀 계측하고, 이를 바탕으로 탈과율과의 상관관계를 규명하였다. 특히, 막대의 굽힘 강성이 과실에 전달되는 최대 가속도 피크에 결정적인 영향을 미치는 것을 확인하였고, 가속도의 변동성 및 가지를 통한 진동 전달 특성을 정량적으로 분석하였다. 이러한 결과는 캐노피 셰이커 막대 재질 및 형상 설계뿐 아니라 진동 변수 최적화에 필요한 공학적 기초 데이터를 제공하며 향후 고효율 셰이커 개발에 직접적으로 기여할 수 있을 것이다.
Castro-Garcia 등(2018)은 세 가지 기계적 원리가 상이한 오렌지 수확용 캐노피 셰이커를 대상으로 진동 전달 특성과 과실의 분리 과정을 분석하였다. 이를 위해 과실에 구멍을 뚫어 무게 중심에 근접한 위치에 독립형 가속도 센서를 삽입하고 수확 과정에서 발생하는 가속도를 정밀 계측하였다(Fig. 10).
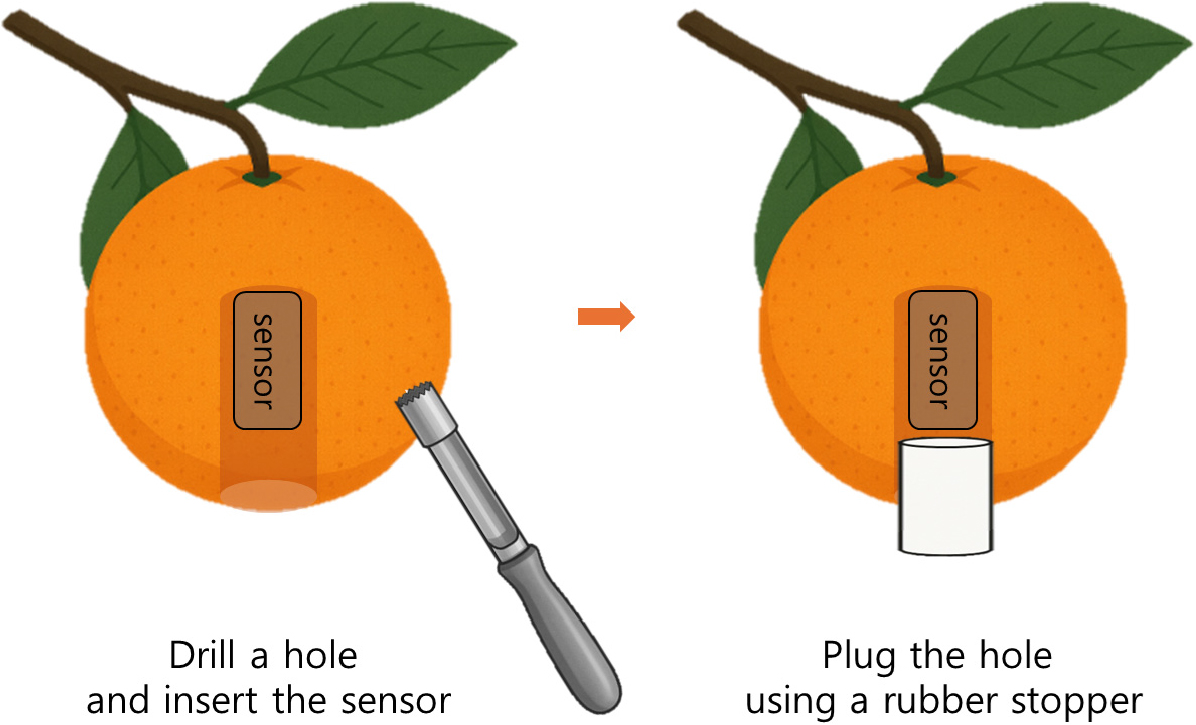
총 73개의 오렌지에서 각 셰이커의 탈과 효율(89%), 과실 분리까지의 평균 진동 시간(1.45 - 5.75 s), 과실이 분리된 후 충격 없이 자유 낙하하는 시간(0.21 - 0.34 s), 과실이 획득한 진동 주파수(4.1 - 4.9 Hz) 및 분리 전후의 RMS 가속도와 가속도 피크의 특성을 분석하였다. 그 결과, 셰이커의 설정 주파수는 과실에 전달되었으나 가속도 값은 셰이커와 수목 간 접촉 상태에 따라 크게 변동하며 복잡한 동적 거동을 보였다. 또한, 과실 분리 직후 셰이커 막대, 가지, 캐치 프레임과의 충돌로 발생하는 충격 가속도(527.6 m·s-2)가 분리 전의 가속도 피크값(401.0 m·s-2)보다 높게 나타나, 과실 손상 방지를 위한 충격 흡수 장치의 설계의 필요성을 확인하였다. 이처럼 데이터 로거가 내장된 독립형 센서 모듈을 과실 내부에 삽입한 계측 기법은 기존 표면 부착 방식 보다 외부 잡음 영향을 최소화하여 보다 정확하고 신뢰성 높은 가속도 데이터를 제공함으로써 차세대 셰이커 설계 및 진동 매개변수 최적화를 위한 기초 자료로서 가치가 있다.
본 항에서 다루는 연구들은 셰이커의 진동이 캐노피를 통해 과실에 전달되는 메커니즘을 분석하고자, 과실 표면 및 내부에 가속도 센서를 부착하여 진동 특성을 계측하였다. 분석 결과, 진동 시간이 탈과 효율에 미치는 영향이 크며, 셰이커와 수목 간의 상호작용이 수확 성능을 좌우하는 핵심 요소임이 확인되었다. 이러한 분석은 진동 매개변수와 함께 셰이커 막대의 강성 및 밀도 등 기계 매개변수가 설계에 있어 중요한 고려 요소임을 시사하며, 셰이커의 최적 설계를 위한 유의미한 정보를 제공한다.
진동 전달 특성의 모델링
Ma 등(2022)은 피스타치오 나무의 진동 전달 특성을 모델링하기 위해 트렁크 셰이커로 가해진 진동이 줄기에서 가지로 전달되는 가속도의 변화 및 전달 특성을 모니터링하는 데 중점을 두었다. 가속도 계측 및 데이터 수집에는 자체 제작한 무선 센서와 데이터 로거를 사용하였다. 센서와 데이터 로거 간 통신은 Wi-Fi 모듈 기반 무선 근거리 통신망으로 구성하여 원격으로 실시간 데이터를 수집하였다. 센서는 셰이커 헤드에 1개, 그리고 각 수목당 줄기에서 분기된 첫 번째 가지, 중간 가지, 최상위 가지 세 지점에 각각 1개씩, 총 세 그루에 설치하여 총 10개를 부착하였다(Fig. 11).
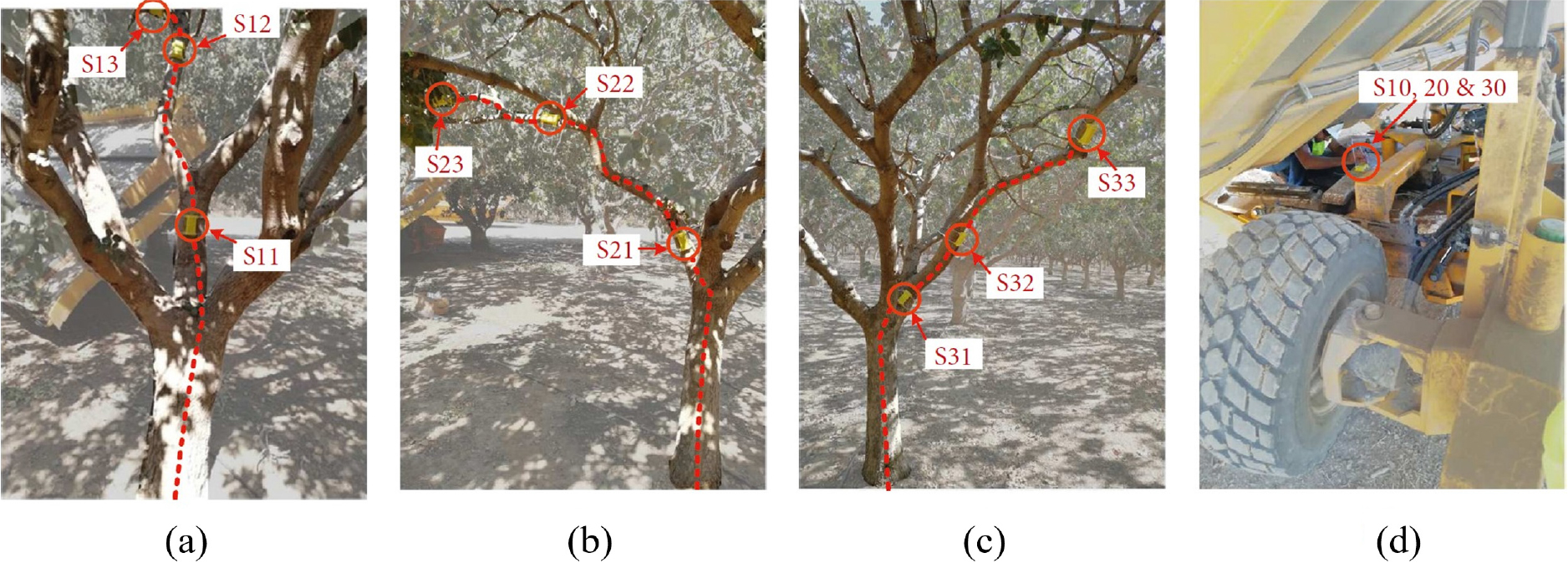
Fig. 11.
Accelerometers were installed on (a) treeⅠ, (b) treeⅡ (c) treeⅢ, and (d) the shaking axle of the shaker. Source: Ma et al. (2022).
셰이커의 진동은 크기와 지속 시간을 달리한 네 가지 패턴으로 구성하였으며, 각 패턴별로 진동원이 가장 먼 최상위 가지까지 전달되는 진동량이 상이하게 나타났다. 가속도 크기 및 변화 양상도 수목별로 차이를 보였으나, 이는 가지 각도나 수목 구조와 같은 형태적 요인이 전달 특성에 영향을 미침을 시사한다. 반면, 합성 가속도의 전달 패턴은 수목과 가지 형태에 독립적이며 예측 가능함을 확인하고, 측정된 데이터를 다항식 모델에 적합시킴으로써 전달 특성을 예측할 수 있는 수리적 근거를 마련하였다. 또한, 줄기에 가해진 가속도의 최대값이 두 번째와 세 번째 가지 사이에서 관측됨에 따라, 과실이 가지 말단에 위치할 경우 최대 가속도가 전달되지 않음을 확인하였다. 따라서, 긴 가지를 적절히 전정함으로써 진동 감쇠를 줄이고 탈과율을 향상시킬 수 있음을 제언하였다.
Macoretta 등(2025)은 올리브 수확용 휴대형 브랜치 셰이커의 효율 개선을 위해 올리브 가지 및 과실 시스템에 대한 다물체(multibody) 모델 및 유한요소(finite element, FE) 모델을 개발하였다. 모델 검증을 위해 과수원 현장에서 가지의 가속도 및 진동 시간, 작용 하중, 탈과력 및 탈과 효율을 실험 측정하였으며 이를 바탕으로 모델의 예측 정확도를 평가하고 올리브 분리 조건을 도출하였다. 가지의 가속도 및 진동 시간을 계측하기 위해 셰이커와 가지의 접촉 지점, 셰이커 연결 지점과 줄기 사이의 중간 지점, 가지 말단 세 위치에 가속도 센서를 부착하였으며 각 센서는 Arduino Mega 기반 데이터 로거에 직접 연결하여 데이터를 수집하였다.
결과적으로 유한요소 해석으로 예측된 최대 응력(8 MPa)이 실험을 통해 측정된 탈과력(3 - 8 MPa)과 일치함을 확인하였으며, 과실의 성숙도에 따라 분리 저항이 감소함을 정량적으로 입증하였다.
위의 선행 연구들은 수학적 모델링 및 다물체 모델, 유한요소 모델과 같은 수치 시뮬레이션 기법을 활용하여 진동 전달 메커니즘을 분석하고, 가속도 센서를 이용한 실증 실험을 병행하였다. 이들 연구에서는 공통적으로 수목의 형태, 크기, 수령, 가지 특성과 같은 물리적·생물학적 구조가 진동 전달 특성에 중대한 영향을 미친다는 점을 확인하였다. 이러한 결과는 실험적 접근만으로는 한계가 있는 복잡한 진동 전달 현상을 수치 시뮬레이션을 통해 보완할 수 있음을 보여주며 향후 유사한 통합적 접근이 필수적임을 시사한다.
과수에 적용된 센서 유형과 데이터 분석 기법을 Table 3에 정리하였다.
Table 3.
Sensor types and analytical methods applied to fruit trees.
| Purpose | Sensor types |
Mounting locations | Analytical techniques | References |
|
Vibration transmission analysis of tree branches |
Piezoelectric accelerometer, 3-axis |
Olive tree branches |
- Uses sum of acceleration vectors - Analysis of shaking signal descriptors: Shaking time, Accumulative shaking time, Number of impacts exceeding a certain acceleration threshold - Linear correlation analysis | Sola-Guirado et al. (2016) |
|
MEMS accelerometer, 3-axis |
Citrus tree branches |
- Uses sum of acceleration vectors - Analysis of vibration variables: Vibration time, Mean peak acceleration, RMS acceleration, Frequency, Cycles per second of rod - FFT - Logistic regression | Castro-Garcia et al. (2019) | |
|
Vibration transmission analysis of fruits |
Piezoelectric accelerometer, 3-axis |
Apple surface, Apple tree branches |
- Low-pass filter (infinite impulse response) applied - Uses sum of acceleration vectors and Average of maximum accelerations - Fruit location index developed - Linear regression analysis | He et al. (2017) |
|
MEMS accelerometer, 3-axis |
Inside of an orange |
- Uses sum of acceleration vectors - Analysis of vibration variables: RMS acceleration, Peak acceleration, Vibration time - FFT - ANOVA and Tukey post-hoc test used | Castro-Garcia et al. (2018) | |
|
MEMS accelerometer, 3-axis |
Citrus tree branches and fruit |
- Uses sum of acceleration vectors - Statistical analysis of acceleration peaks - Non-linear large deformation modeling and vibration response simulation | Liu et al. (2018) | |
|
Modeling of vibration transmission characteristics |
MEMS accelerometer, 3-axis |
Olive tree branches |
- FE and Multibody modeling - Band-pass filter applied - Utilizing Dynamic amplification factor - ANOVA and LSD used | Macoretta et al. (2025) |
|
MEMS accelerometer, 3-axis |
Shaker head and pistachio tree branches |
- Uses sum of acceleration vectors - New evaluation indices developed: Sensor location index, Relative force ratio, Relative kinetic energy ratio - Acceleration modeling using a third-degree polynomial function and Linear regression analysis | Ma et al. (2022) |
검토된 선행 연구들을 바탕으로 할 때, 과수의 진동 전달 특성 계측에는 모두 가속도 센서 형태의 관성센서가 활용되었으며, 센서는 주로 가지 및 과실에 부착되어 계측이 수행되었다. 반면, 줄기에 센서를 부착한 사례는 조사되지 않았으며, 트렁크 셰이커에 관련된 일부 연구에서는 셰이커 헤드에 부착된 센서의 가속도를 클램프 지점 줄기의 가속도로 간주하여 동일하게 취급하였다. 이는 줄기는 과실로부터 거리가 멀고, 해당 위치에서 발생한 진동이 과실까지 효과적으로 전달되기 어렵다는 점을 반영한 것으로 해석된다. 한편, 유선 연결이 필수적인 압전식 가속도 센서를 과실 표면에 부착한 사례가 확인되었으나, 과실 탈락 과정을 계측하는 경우에는 케이블의 장력 및 무게가 물리적 간섭 요인으로 작용하여 계측 정확도에 부정적인 영향을 줄 수 있다. 따라서, 무선 통신 기능을 갖춘 소형 센서 모듈의 활용이 보다 정밀한 데이터 수집에 적합할 것으로 판단된다. 분석 기법으로는 시간 및 주파수 영역의 가속도 분석 및 통계 분석이 주를 이루었고 평가 지표를 개발한 사례도 일부 조사되었다.
Discussion
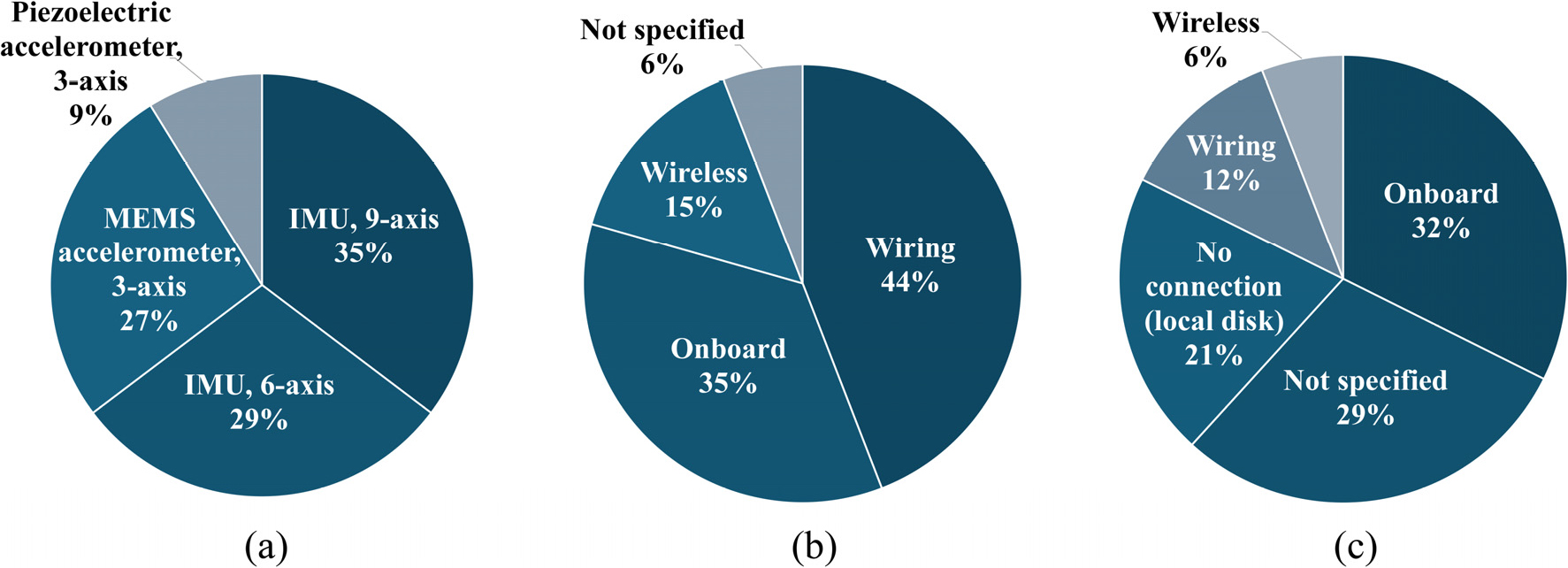
검토된 연구들에서 사용된 관성센서와 데이터 수집 환경을 Table 4 및 Fig. 12에 정리하였다.
관성센서의 유형별 사용 비율은 IMU가 64.7%, 가속도 센서가 35.3%로 나타났다. IMU는 주 용도인 동적 객체의 직선 운동 및 회전 운동 계측에 활용되었으며, 자기 센서를 포함한 9축 센서가 6축 센서보다 더 많이 채택되었다. 그러나 실제로 9축 센서를 사용하였음에도 불구하고 자기 센서를 활용하지 않은 사례도 있어 반드시 필요에 의해 선택된 것은 아닐 가능성이 있다. 또한, 자기 센서는 주변에서 발생하는 전파 및 자기장의 영향에 민감하다는 특성으로 인해 방위각 추정 시 높은 정확도를 확보하기 어렵다는 한계가 있으므로 센서의 사양 및 활용 목적을 고려한 선택이 요구된다. 한편, 가속도 센서는 정적 객체인 과수의 진동 전달 특성 분석에 주로 사용되었다. 과수에 대한 IMU의 적용 사례가 적은 것은 나뭇가지 또는 과실의 회전 운동에 관한 연구의 공백이 존재함을 의미한다. 가속도 센서 중에서는 압전식 가속도 센서가 상당 비율로 사용되었으며, 이는 정적 객체의 진동 시험에서 일반적으로 사용되는 계측기로 인식되어 채택되었을 가능성이 있다. 비록 고가 장비라는 단점이 있으나 데이터 수집(data acquisition, DAQ) 시스템과의 연동을 통해 정밀 계측 및 데이터 분석의 간편성과 신속성이 높게 평가된 결과로 판단된다. MEMS 가속도 센서 또는 IMU는 저비용으로 도입이 가능하다는 장점이 있으나, 계측 이후의 데이터 분석 단계에서는 작업자의 역량에 따라 분석의 질과 효율이 크게 좌우되므로 후속 처리 과정에서의 진입 장벽이 높다고 할 수 있다. 한편, 압전식 가속도 센서는 중력 가속도를 포함한 정적 가속도는 계측할 수 없기 때문에 계측 목적에 적합한 센서의 선택이 요구된다.
데이터 수집을 위한 통신 방식으로는 센서와 수집 장치 간의 유선 연결이 가장 높은 비중을 차지하였으며 그 다음으로는 수집 장치가 내장된 방식(onboard)이 주로 사용되었다. 유선 연결이 가장 많이 사용된 이유는, 기계의 경우 동력원으로 부터 전원을 공급받을 수 있고, 정적 객체인 과수는 외부 전원 연결이 가능하여 무선 연결에 따른 데이터 누락 위험이나 배터리 교체 문제로부터 자유롭기 때문이다. 유선 연결이 물리적으로 어려운 가축과 같은 동적 객체에 대해서만 무선 연결 방식 또는 수집 장치 내장형 방식이 적용되었으며, 시중에 판매되는 웨어러블 센서 제품 대부분은 무선 또는 내장형 방식으로 설계되어 있다.
수집 장치와 저장 장치 간 통신 방식에서는 저장 장치 내장형과 PC (로컬 디스크)를 활용하여 데이터 수집과 저장을 병행하는 방식이 많은 비율을 차지하였으며, 이에 따라 별도의 연결이 필요하지 않은 경우가 많음을 확인할 수 있었다. 저장 장치 내장형의 대부분은 MicroSD 카드를 활용한 방식이었고, PC 저장 방식의 경우에는 USB 또는 시리얼 통신 기반의 유선 연결이 사용되었다. 한편, 무선 연결 방식은 데이터를 클라우드 서비스에 업로드하여 관리하는 경우에만 채택되었다.
본 연구에서 고찰한 선행 연구들을 종합적으로 분석한 바, 향후 연구를 위한 주요 과제와 방향성은 다음과 같이 정리될 수 있다.
GNSS에 의존하지 않는 위치 추정 및 경로 추종 시스템의 개발은 농업용 기계 및 로봇에 있어 해결해야 할 주요 과제 중 하나이며, 이를 위해서는 센서 융합 기법과 알고리즘의 고도화를 통해 방위각 추정의 정확성을 향상시키는 접근이 요구된다.
가축에 센서를 적용하는 경우, 생리적 변화와 불규칙한 동작 특성으로 인해 유선 연결이 불가능하므로, 전원 공급과 데이터 수집은 무선 연결 방식을 필수적으로 요구한다. 또한 충분한 배터리 구동 시간의 확보를 위해 저전력 모듈이나 고에너지밀도 소형 배터리와 같은 하드웨어의 개발뿐만 아니라 에너지 효율을 극대화할 수 있는 알고리즘과의 연계 설계를 통해 저전력 시스템을 구축할 필요가 있다.
진동 수확의 최적화에 있어서는 탈과율과 수목 손상 간의 상충 관계를 균형 있게 조절하는 것이 핵심 과제이며, 이를 위해 진동을 계측하는 관성센서가 필수적이다. 본 연구에서 진동 매개변수와 탈과율 간의 관계를 분석한 사례는 다수 확인되었으나, 가속도 센서를 활용한 셰이커 막대의 충격 가속도와 수목 손상 간의 상관관계를 정량적으로 다룬 연구는 확인되지 않았다. 또한, 자이로 센서를 활용한 가지 및 과실의 회전 운동과 탈과율 간의 관계에 대해서도 연구의 공백이 존재한다.
Table 4.
Sensors used and data acquisition environment.
| No. |
Sensors (Brand-Model) | Sensor types |
Target applications | DAQ devices | Storage devices |
Sensor-DAQ connection methods |
DAQ-Storage connection methods | References |
| 1 | Aceinna - MTLD305D | IMU, 6-axis | Machine |
Microcontroller (Infineon XC2387A) | Not specified | Wiring | Not specified | Yu et al. (2022) |
| 2 |
Adafruit learning system - BNO055 | IMU, 9-axis | Machine | Industrial PC | Industrial PC | Wiring |
- (local disk) | Rey et al. (2019) |
| 3 | Analog Devices - ADXL356 |
MEMS accelerometer, 3-axis | Fruit tree |
Microcontroller (Arduino Mega) | Not specified | Wiring | Not specified | Macoretta et al. (2025) |
| 4 | Analog Devices - ADIS16460 | IMU, 6-axis | Machine | Not specified | Not specified | Wiring | Not specified | Zhang et al. (2020) |
| 5 |
Analog Devices - ADXL345 (based custom-built device) |
MEMS accelerometer, 3-axis | Livestock | PC | PC | Wireless |
- (local disk) | Russel and Selvaraj (2024) |
| 6 | ATR-Promotions - TSDN151 | IMU, 6-axis | Livestock | PC | PC | Wireless |
- (local disk) | Shimmura et al. (2024) |
| 7 |
Beijing Beidou Satellite Communication Group - KY-IMU102N-A0 (based custom-built device) | IMU, 6-axis | Machine |
Microcontroller (STMicroelectronics STM32F429) | Not specified | Wiring | Not specified | Chen et al. (2024) |
| 8 |
Beijing Sanchi Inertial Technology - 100D2 | IMU, 9-axis | Machine | Industrial PC | Industrial PC | Wiring |
- (local disk) | Zhang et al. (2022) |
| 9 |
Bosch Sensortec - BMA220 (based custom-built device) |
MEMS accelerometer, 3-axis | Livestock |
Microcontroller (Microchip ATmega2560P) | microSD card | Onboard | Onboard | Cui et al. (2019) |
| 10 |
Bosch Sensortec - BMI055 (integrated inside Intel RealSense Tracking Camera T265) | IMU, 6-axis | Machine | PC | PC | Wiring |
- (local disk) | Yan et al. (2022) |
| 11 |
Bosch Sensortec - BNO055 (based custom-built device) | IMU, 9-axis | Livestock |
Microcontroller (Heltec ESP32) | Not specified | Onboard | Not specified | Muñoz-Poblete et al. (2024) |
| 12 |
Gulf Coast Data Concepts - HAM-IMU | IMU, 9-axis | Livestock | Built-in data logger | Flash memory | Onboard | Onboard | Fischer et al. (2022) |
| 13 |
Gulf Coast Data Concepts - X200-4 |
MEMS accelerometer, 3-axis | Fruit tree | Built-in data logger | microSD card | Onboard | Onboard | Castro-Garcia et al. (2019) |
| 14 |
Gulf Coast Data Concepts - X200-4 |
MEMS accelerometer, 3-axis | Fruit tree | Built-in data logger | microSD card | Onboard | Onboard | Castro-Garcia et al. (2018) |
| 15 | Hfsensing - DETA20 | IMU, 9-axis | Machine | Main control board | Not specified | Wiring | Onboard | Ke et al. (2024) |
| 16 |
Intelligent Farm Technologies - iFarmTec collars |
MEMS accelerometer, 3-axis | Livestock |
Embedded computer (Raspberry Pi 3 Model B Plus Rev1.3) |
Cloud storage service | Wireless | Wireless | Goncalves et al. (2024) |
| 17 |
InvenSense - ICM-20948 (on Hongye breakout board) | IMU, 9-axis | Machine | Industrial PC | Industrial PC | Wiring |
- (local disk) | Liu et al. (2022) |
| 18 |
InvenSense - MPU9250 (based custom-built device) | IMU, 9-axis | Livestock |
Microcontroller (Heltec ESP32) |
Not specified (presumably PC) | Onboard | Not specified | Muñoz-Poblete et al. (2024) |
| 19 | Motorola - MMA7260Q |
MEMS accelerometer, 3-axis | Fruit tree |
Microcontroller (Microchip ATmega2560) |
PC (local disk) | Onboard | Wiring | Liu et al. (2018) |
| 20 | Movella - Xsens MTw Awinda | IMU, 9-axis | Livestock |
dedicated data logger (Awinda station) | PC (local disk) | Wireless | Wiring | Shahbazi et al. (2023) |
| 21 | Not specified | IMU, 6-axis | Machine |
Microcontroller (Infineon XC2387A) | Not specified | Wiring | Not specified | Yu et al. (2022) |
| 22 | Not specified |
MEMS accelerometer, 3-axis | Machine |
Microcontroller (Infineon XC2387A) | Not specified | Wiring | Not specified | Yu et al. (2022) |
| 23 | Not specified | IMU, 6-axis | Livestock | Not specified | Not specified | Not specified | Not specified | Russel and Selvaraj (2024) |
| 24 | Not specified | IMU, 9-axis | Livestock |
Microcontroller (STMicroelectronics STM32L072) |
Cloud storage service (Amazon Web Services) | Onboard | Wireless | Ojo et al. (2022) |
| 25 | NovAtel - SPAN-CPT | IMU, 6-axis | Machine |
Industrial PC (ADLINK Technology MXC-6201D-M2G) |
Industrial PC (ADLINK Tech- nology MXC- 6201D-M2G) | Wiring |
- (local disk) | Han et al. (2019) |
| 26 | PCB Piezotronics - 356A02 |
Piezoelectric accelerometer, 3-axis | Fruit tree |
Portable DAQ/DSA system (OROS 25 PC-Pack II) |
Internal storage of OROS 25 PC-Pack II | Wiring | Onboard | Sola-Guirado et al. (2016) |
| 27 | PCB Piezotronics - 356A16 |
Piezoelectric accelerometer, 3-axis | Fruit tree |
PC-based DAQ (cDAQ chassis + NI 9234 module) |
PC (local disk) | Wiring | Wiring | He et al. (2017) |
| 28 | PCB Piezotronics - 356A26 |
Piezoelectric accelerometer, 3-axis | Fruit tree |
PC-based DAQ (cDAQ chassis + NI 9234 module) |
PC (local disk) | Wiring | Wiring | He et al. (2017) |
| 29 |
ROHM - KX122-1037 (based custom-built device) |
MEMS accelerometer, 3-axis | Livestock | Not specified | Not specified | Not specified | Not specified | Russel and Selvaraj (2024) |
| 30 |
STMicroelectronics - LIS3DH (based custom-built device) |
MEMS accelerometer, 3-axis | Fruit tree |
Embedded computer (Raspberry Pi 3 B+) | microSD card | Wireless | Onboard | Ma et al. (2022) |
| 31 |
STMicroelectronics - LSM9DS1 (on SparkFun breakout board) | IMU, 9-axis | Machine |
microSD card-based data logger (SparkFun Logomatic v2) | microSD card | Onboard | Onboard | Anjom et al. (2018) |
| 32 |
STMicroelectronics - STM33DH/AGDI (integrated inside iPhone 4S) | IMU, 6-axis | Livestock |
iPhone APP (SensorData, Wavefront Labs) |
iPhone internal storage | Onboard | Onboard | Andriamandroso et al. (2017) |
| 33 | WitMotion - WT901SDCL | IMU, 9-axis | Livestock | Built-in data logger | microSD card | Onboard | Onboard | Liu et al. (2023) |
| 34 | WitMotion - WT901SDCL | IMU, 9-axis | Livestock | Built-in data logger | microSD card | Onboard | Onboard | Wu et al. (2022) |
Conclusion
본 연구는 농업 분야에서 관성센서의 활용 환경이 조성되고 있는 현황을 바탕으로, 관성센서의 활용 대상을 세 가지로 분류하여 관련 선행 연구들을 고찰하고 향후 과제 및 발전 방향을 제시하였다.
관성센서를 기계에 적용한 연구에서는 농업용 차량이나 로봇의 자율 주행을 위한 자세 및 위치 추정, 경로 추종, 맵핑 시스템에 IMU가 탑재되었으며, 자세각의 정확도 향상을 목적으로 한 알고리즘 개발 및 센서 퓨전 시스템의 핵심 역할로 활용한 사례가 주를 이루었다. 가축에 적용한 사례에서는 신체 부위에 웨어러블 IMU를 부착하고 통계 분석 및 다양한 딥 러닝 기법과 결합함으로써 가축의 특정 행동을 감지하거나 행동 패턴을 분류하는 데에 활용되었다. 과수의 경우에는 진동 수확기의 성능 최적화를 목적으로 과수의 진동 반응 및 진동 전달 특성 분석을 위해 가지 및 과실에 가속도 센서를 부착하여 진동 가속도를 계측하는 데 활용되었다.
세 분류 대상 각각에 대한 주요 과제와 연구의 방향성에 대해서는 앞 장에서 논의한 바와 같으나, 생체 분야에서는 적용성 측면에서 보다 높은 기술적 도전과제가 존재한다. 현재까지 관성센서는 작물 중 주로 과수를 대상으로 한 특정 목적으로 적용되어 왔으며, 곡물이나 과채류와 같이 센서 부착이 어려운 작물에는 적용이 제한적이었다. 이러한 한계를 극복하기 위해서는 하중 지지 능력이 낮은 작물에도 적용 가능한 초소형·초경량의 식물 웨어러블 관성센서 개발이 핵심 과제로 도출된다. 향후 센서의 하드웨어 기술 발전에 따라 다양한 작물의 물리적 반응을 실시간으로 계측하고 분석할 수 있는 기반이 마련될 것으로 기대된다.
